
自制硬件
当按照上述开发环境中完成功能开发后,考虑生产成品设备就可以考虑自制硬件将OSDK设备或PSDK负载直接连接到无人机上。通过上述介绍,已经了解到,无人机给负载的接口都是通过特定的端口和引脚定义提供,所以自制硬件时就需要仔细了解OSDK和PSDK端口的引脚定义,在自制硬件时就无需再使用拓展板,直接将引脚与负载设备的功能引脚对应起来即可。
OSDK引脚定义
OSDK引脚定义是M300上无人机的type C接口的定义,此type C接口非通用type C端口,不可反接。
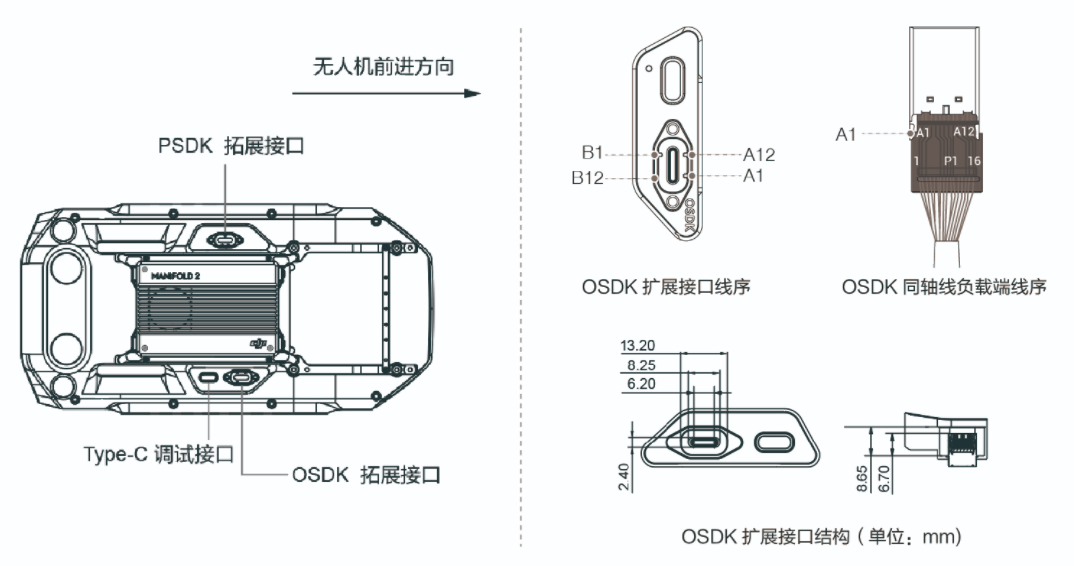
| A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 接口名称 | GND | NC | NC | VCC_24V | SYNC_PPS | USB_ID | USB_VBUS | ON_DET | VCC_24V | NC | NC | GND |
| B12 | B11 | B10 | B9 | B8 | B7 | B6 | B5 | B4 | B3 | B2 | B1 | |
| 接口名称 | GND | NC | NC | VCC_24V | UART_RX | USB_DM | USB_DP | UART_TX | VCC_24V | NC | NC | GND |
接口功能说明:
-
-
如需为机载计算机供电,请使用VCC_24V 引脚。
说明
-
该接口的额定电压为24V,无人机输出的总功率为96w。
-
该接口的VCC_24V 引脚在同一网络下,开发者可根据实际的使用需求连接VCC_24V 引脚数量。但为保证无人机能够持续稳定地输出电流,请同时连接4 个VCC_24V 引脚。
-
-
M300默认做USB从设备,USB_ID引脚(A6)必须悬空。
-
USB_VBUS引脚(A7)如需与OSDK设备VBUS引脚连接时,需要接TVS器件做好ESD防护,电压不能超过5V。
-
ON_DET 引脚(A8)为M300外接OSDK设备检测引脚,接入ON_DET 引脚(A8)的对端必须为GND,请勿串联任何阻值电阻,此时才会有24V电压输出。
-
-
数据通信接口:
-
如需使用USB 2.0 的功能,请使用USB_DP 引脚(B6)和USB_DM 引脚(B7)。
-
如需通过无人机上的串口,实现机载计算机和无人机间的通信,请使用UART_RX 引脚(B8)和UART_TX 引脚(B5)。UART_RX 引脚(B8)需连接OSDK设备的TX端,UART_TX 引脚(B5)需连接OSDK设备的RX端。
-
-
时间同步:如需使用无人机对外输出的同步信号,实现时间同步功能,请使用SYNC_PPS 引脚(A5)。
PSDK引脚定义
配件介绍中已经提供截图,X-PORT与skyport v2的排线接口定义完全一致,仅对skyport v2进行说明:
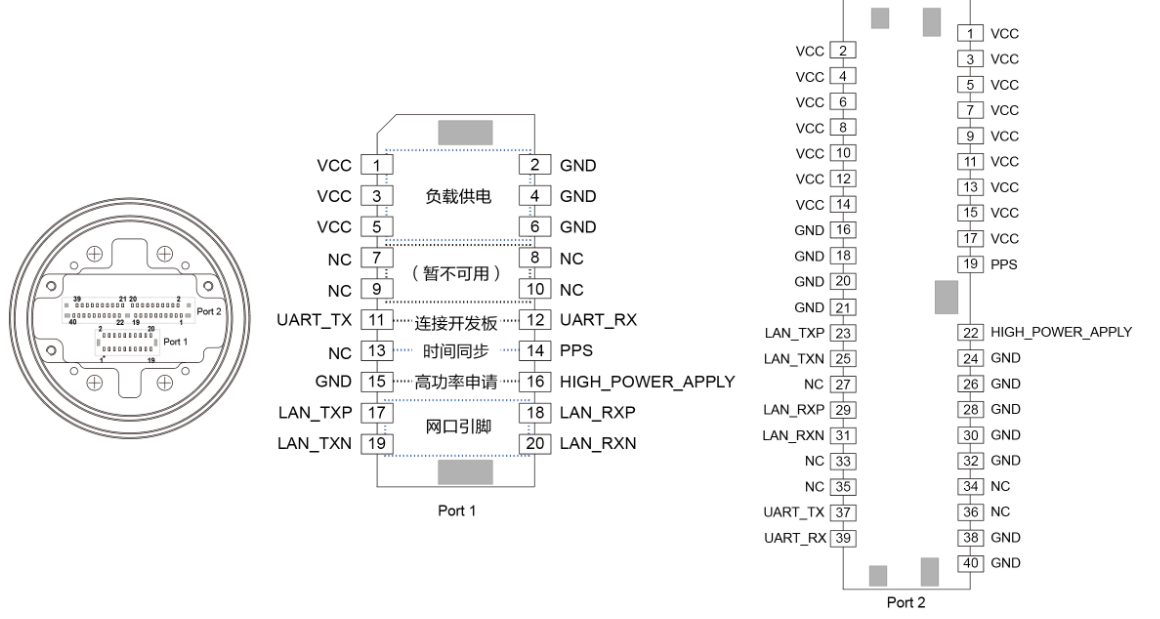
Port 1
-
使用SkyPort V2 的供电功能,请使用引脚:1~6;
-
为实现使用SkyPort V2 开发的负载设备与DJI 的无人机通信,必须连接引脚:11和12;
-
使用PSDK 提供的时间同步功能,需要连接PPS 引脚(14)与具有RTK 功能的无人机间同步时间;
-
使用高功率功能的负载设备通过引脚15 和16 向DJI 的无人机申请高功率;
-
使用网口高速数据传输功能,需连接引脚17~20。
Port 2
-
使用SkyPort V2 的供电功能,请使用引脚:1~17;
-
为实现使用SkyPort V2 开发的负载设备与DJI 的无人机通信,必须连接引脚:37和39;
-
使用PSDK 提供的时间同步功能,需要连接PPS 引脚(19)与具有RTK 功能的无人机间同步时间;
-
使用高功率功能的负载设备通过HIGH_POWER_APPLY 引脚(22) 向DJI 的无人机申请高功率;
-
使用高速数据传输功能,需连接引脚23、25、29 和31。
说明:
1. OSDK端口的线序定义是由OSDK type C端口定义的,OSDK同轴线本身没有定义,但同轴线接入无人机端口做了防呆设计,所以官方的同轴线会有A/B(P1/P2)面。
2. 自制硬件时仅需了解无人机提供的接入端口定义,M300上OSDK type C给出引脚定义,PSDK type C端口引脚定义不对开发者开放,仅支持通过skyport/X-PORT的排线接口引脚定义。
3. M300 OSDK type C端口引脚定义与M30 PSDK端口引脚定义完全一致,可以参考M30提供的原理图。
评论
0 条评论
请登录写评论。