
【背景】
从5.6版本开始,在项目中引入wpmzSDK可以使用WPMZManager去实现KMZ文件的读取和生成。
这里是WPMZManager的在线API文档地址:https://developer.dji.com/cn/api-reference-v5/android-api/Components/IWaypointMissionManager/IWPMZManager.html#iwpmzmanager
【如何使用WPMZManager】
流程图结合API文档,开发者可以了解到各个接口的作用和使用顺序。
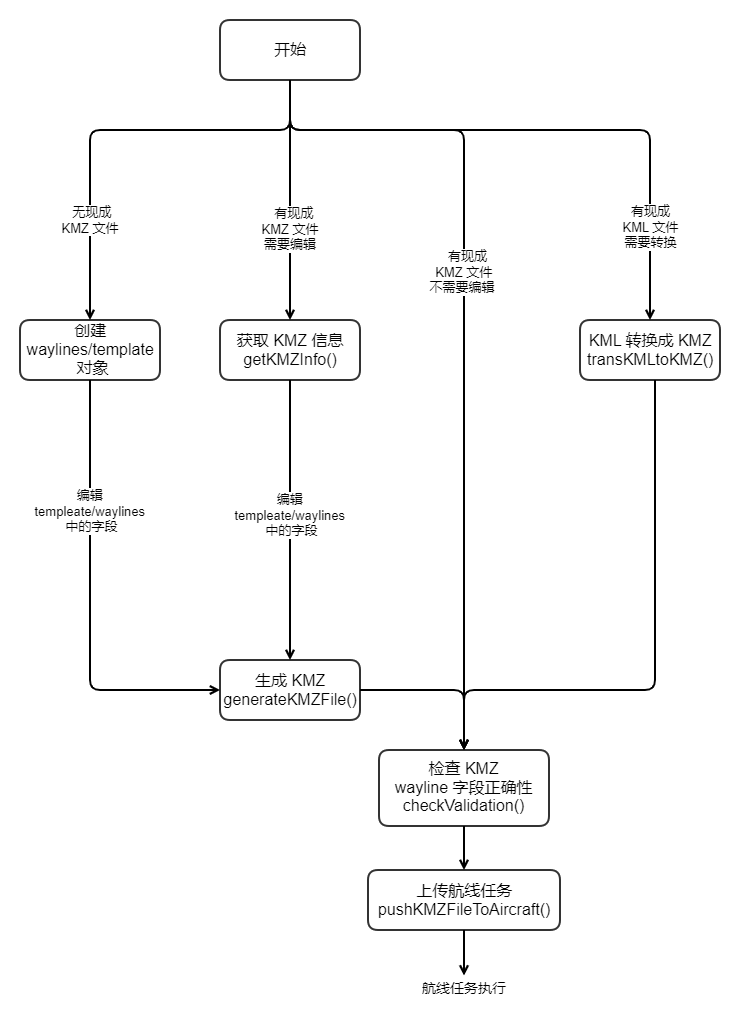
这些是一些补充讲解:
WPMZManager下的两个同名generateKMZFile接口之间的差别是在于接收不同的航线任务信息。
Template对应kmz文件里的template.kml文件。
Wayline对应kmz文件里的waylines.wpml。
如果您需要生成的文件在Pilot 2中可以使用,推荐使用参数为Template的generateKMZFile接口。
【如何生成kmz文件】
WPMZManager下的generateKMZFile用于生成kmz文件。下面将详细讲解如何使用以参数为Template的generateKMZFile接口生成航线文件。
*接口和参数定义:
void generateKMZFile(String kmzPath , WaylineMission waylineMission , WaylineMissionConfig config , Template waylineTemplate )
kmzPath:生成文件的存放路径
WaylineMission:航点任务文件信息,例如任务创建时间,作者等
WaylineMissionConfig:航点任务全局信息,例如失控动作,结束动作,安全起飞高度等
Template:航点任务信息,即航点以及对应的航点动作
WaylineMission中的内容较少且不会影响到航点任务的执行,因此这里将不作详细说明。开发者可以直接在代码中查看其注释(建议使用wpmzSDK 1.0.1.5及其以上)。
*WaylineMissionConfig的全部属性:
class WaylineMissionConfig implements DJIValue, JNIProguardKeepTag, ByteStream{
/**
* 飞向首航点模式,必需
* fly to wayline mode
* refs:flyToWaylineMode
*/
WaylineFlyToWaylineMode flyToWaylineMode = WaylineFlyToWaylineMode.UNKNOWN;
/**
* 航线结束动作,必需
* wayline route end action
* refs:finishAction
*/
WaylineFinishedAction finishAction = WaylineFinishedAction.UNKNOWN;
/**
* 失控动作类型,必填
* Out of control action type
* refs:exitOnRCLost
*/
WaylineExitOnRCLostBehavior exitOnRCLostBehavior = WaylineExitOnRCLostBehavior.UNKNOWN;
/**
* 失控动作,在失控动作类型为执行失控动作是必填,其他时刻非必填
* Out of control action
* refs:executeRCLostAction
*/
WaylineExitOnRCLostAction exitOnRCLostType = WaylineExitOnRCLostAction.UNKNOWN;
/**
* 全局航线过度速度, m/s,必填
* Global route transition speed
* refs:globalTransitionalSpeed
*/
Double globalTransitionalSpeed = 0d;
/**
* 安全起飞高度,必填
* safe takeoff altitude
* refs:takeOffSecurityHeight
*/
Double securityTakeOffHeight = 0d;
/**
* 安全起飞高度是否设置,必填
* Is the safe takeoff altitude set
*/
Boolean isSecurityTakeOffHeightSet = false;
/**
* 参考起飞点,高度为椭球高,非必填
* Reference take-off point, height is ellipsoid height
* refs:takeOffRefPoint
*/
WaylineLocationCoordinate3D takeOffPositionRef;
/**
* 参考起飞点是否设置,非必填
*/
Boolean isTakeOffPositionRefSet = false;
/**
* 参考起飞点,编辑高度,AGL,非必填
*/
Double takeOffPositionAGL = 0d;
/**
* 是否设置参考起飞点AGL,非必填
*/
Boolean isTakeOffPositionAGLSet = false;
/**
* 任务飞机设备,非必填
* mission aircraft equipment
* refs:droneInfo
*/
WaylineDroneInfo droneInfo;
/**
* 任务挂载负载设备,定位负载类型,负载镜头及参数由使用到的template指定,非必填,
* payload infomations
* refs:payloadInfo
*/
List<WaylinePayloadInfo> payloadInfo = new ArrayList<WaylinePayloadInfo>();
/**
* 全局返航高度,仅在机场生效
* Global return altitude
* refs:globalRTHHeight
*/
Double globalRTHHeight = 0d;
/**
* 全局返航高度是否设置,仅在机场生效
* Is the global return altitude set
*/
Boolean isGlobalRTHHeightSet = false;
/**
* 航线绕行信息,仅在机场生效
* Route detour information
*/
WaylineAvoidInfo avoidInfo;
/**
* 是否设置绕行,仅在机场生效
* Whether to set a bypass
*/
Boolean isAvoidInfoSet = false;
}
上述属性可以根据定义在template.kml中找到对应的元素,以了解取值范围和详细描述。
这里是template.kml的格式和标准:
https://developer.dji.com/doc/cloud-api-tutorial/cn/api-reference/dji-wpml/template-kml.html
这里是一些补充说明:
1.exitOnRCLostType当且仅当exitOnRCLostBehavior为EXCUTE_RC_LOST_ACTION时生效;
2.WaylineAvoidInfo和isAvoidInfoSet仅支持M3TD和M3TD;
3.takeOffPositionRef仅做航线规划参考,飞行器执行航线时以飞行器真实的起飞点为准,高度使用椭球高。
*Template的定义:
public class Template {
/**
* 模版id 默认0 参考文档中字段templateId
* Template id defaults to 0. Refer to the field templateId in the document.
* refs:templateId
*/
private Integer templateId;
/**
* 坐标系参数,必填
* Coordinate system parameters
* refs:waylineCoordinateSysParam
*/
private WaylineCoordinateParam coordinateParam;
/**
* 全局航线过渡速度,必填
* Global route transition speed
* refs:globalTransitionalSpeed
*/
private Double transitionalSpeed;
/**
* 是否使 transitionalSpeed 字段生效,必填
*/
private Boolean useGlobalTransitionalSpeed;
/**
* 全局航线飞行速度,必填
* Global route flight speed
* refs:autoFlightSpeed
*/
private Double autoFlightSpeed;
/**
* 负载设置
* payload settings
* refs:payloadParam
*/
private List<WaylinePayloadParam> payloadParam;
/**
* 航点飞行模板元素,详细介绍可见
* Waypoint flight template elements
*/
private WaylineTemplateWaypointInfo waypointInfo;
}
上述属性可以根据定义在template.kml中找到对应的元素,以了解取值范围和详细描述。
这里是template.kml的格式和标准:
https://developer.dji.com/doc/cloud-api-tutorial/cn/api-reference/dji-wpml/template-kml.html
其中WaylineCoordinateParam的属性如下:
//经纬度坐标系,即coordinateMode
WaylineCoordinateMode coordinateMode = WaylineCoordinateMode.UNKNOWN;
//高度模式,即heightMode
WaylineAltitudeMode altitudeMode = WaylineAltitudeMode.UNKNOWN;
/**
* 非必填,全局飞机离被摄面高度
*/
Double globalShootHeight = 0d;
Boolean isGlobalShootHeightSet = false;
/**
* 非必填,仿地飞行参数
*/
SurfaceFollowParam surfaceFollowParam;
Boolean isSurfaceFollowParamSet = false;
/**
* 非必填,经纬度与高度数据源,即wpml:positioningType
*/
WaylinePositioningType positioningType = WaylinePositioningType.UNKNOWN;
Boolean isWaylinePositioningTypeSet = false;
WaylineTemplateWaypointInfo是存储航点和航点动作的模板类。下面是WaylineTemplateWaypointInfo属行介绍。
/**
* 自由航点,非必填,航向模式,Placemark可重新配置该值,即wpml:globalWaypointHeadingParam
*/
WaylineWaypointYawParam globalYawParam;
Boolean isTemplateGlobalYawParamSet = false;
/**
* 自由航点,非必填,gimbal航向模式,Placemark可重新配置该值
*/
WaylineWaypointGimbalHeadingParam globalGimbalHeadingParam;
Boolean isTemplateGlobalGimbalHeadingParamSet = false;
/**
* 自由航点,转弯模式参数,Placemark可重新配置该值,当是协调转弯时,每个点需要设置转弯半径
即wpml:globalWaypointTurnMode
*/
WaylineWaypointTurnMode globalTurnMode = WaylineWaypointTurnMode.UNKNOWN;
Boolean isTemplateGlobalTurnModeSet = false;
/**
* 必填, 航段是否为直线
*/
Boolean useStraightLine = false;
/**
* 自由航点,全局航点动作,非必需(对应startActionGroup)
*/
WaylineActionGroup globalAction;
Boolean isGlobalActionSet = false;
/**
* 非必填,自由航点,全局航线飞行编辑高度,根据heightmode,表示意义不同,每个航点的实际飞行高度,在航点中写入
*/
Double globalFlightHeight = 0d;
Boolean isGlobalFlightHeightSet = false;
/**
* 自由航点,Placemark
*/
List<WaylineWaypoint> waypoints = new ArrayList<WaylineWaypoint>();
/**
* 自由航点,动作
*/
List<WaylineActionGroup> actionGroups = new ArrayList<WaylineActionGroup>();
/**
* 非必填,航线云台控制参数,即wpml:gimbalPitchMode
*/
WaylineWaypointPitchMode pitchMode = WaylineWaypointPitchMode.UNKNOWN;
/**
* 是否开启标定飞行
*/
Boolean caliFlightEnable = false;
WaylineWaypoint和WaylineActionGroup即为航点任务中最为重要和关键的航点和动作组。下面是WaylineWaypoint所含属性:
/**
* 必填,航点序号,不可重复
*/
Integer waypointIndex = 0;
/**
* 必填,航点位置
*/
WaylineLocationCoordinate2D location;
/**
* 航点高度
*/
Double height = 0d;
/**
* 是否使用全局高度;WaylineCoordinateParam中的globalFlightHeight
*/
Boolean useGlobalFlightHeight = false;
/**
* 航点使用的椭球高
*/
Double ellipsoidHeight = 0d;
/**
* 非必填,航向参数。对应<wpml:waypointHeadingParam>
*/
WaylineWaypointYawParam yawParam;
Boolean isWaylineWaypointYawParamSet = false;
/**
* 是否使用全局heading设置,来源于:全局的WaylineTemplateWaypointInfo中的globalYawParam
*/
Boolean useGlobalYawParam = false;
WaylineWaypointGimbalHeadingParam gimbalHeadingParam;
Boolean isWaylineWaypointGimbalHeadingParamSet = false;
/**
* 是否使用全局heading设置,来源于:全局的WaylineTemplateWaypointInfo中的globalHeadingParam
*/
Boolean useGlobalGimbalHeadingParam = false;
/**
* 非必填,转弯参数,对应<wpml:waypointTurnParam>
*/
WaylineWaypointTurnParam turnParam;
Boolean isWaylineWaypointTurnParamSet = false;
/**
* 是否使用全局WaylineWaypointTurnParam,来源于:全局的WaylineTemplateWaypointInfo中的WaylineWaypointTurnMode
*/
Boolean useGlobalTurnParam = false;
/**
* 非必填,航点巡航速度,单位 m/s
*/
Double speed = 0d;
/**
* 是否使用全局速度,全局速度来自:autoFlightSpeed
*/
Boolean useGlobalAutoFlightSpeed = false;
/**
* 必填, 航段是否为直线
*/
Boolean useStraightLine = false;
/**
* 云台俯仰角度
*/
Double gimbalPitchAngle = 0d;
/**
* 该航点是否使用全局动作
*/
Boolean useGlobalActionGroup = false;
/**
* 表示该点是否为不可向上返航点,仅用于机场
*/
Boolean isRisky = false;
WaylineActionGroup的属性如下:
Integer groupId = 0; //动作组序号,必填且唯一
Integer startIndex = 0;//开始航点序号
Integer endIndex = 0;//结束航点序号
WaylineActionTrigger trigger;//动作触发器
List<WaylineActionNodeList> nodeLists = new ArrayList<WaylineActionNodeList>();//动作树,决定动作执行顺序
List<WaylineActionInfo> actions = new ArrayList<WaylineActionInfo>();//航点动作
WaylineActionNodeList管理了一个WaylineActionTreeNode列表。下面是WaylineActionTreeNode的属性介绍:
//节点类型。LEAF表示当前节点为子节点,SEQUENCE表示顺序执行,可以用在父节点。
WaylineActionsRelationType nodeType = WaylineActionsRelationType.UNKNOWN;
Integer childrenNum = 0;//子节点数量
Integer actionIndex = 0;//对应动作序号
WaylineActionInfo存储了航点动作类型和动作参数,用于表示动作执行内容。下面是WaylineActionInfo的属性介绍:
Integer actionId = 0;//动作序号
WaylineActionType actionType = WaylineActionType.UNKNOWN;//动作类型。根据动作类型,使用下面对应的动作参数。
/**
* 相机单拍
*/
ActionTakePhotoParam takePhotoParam;
/**
* 开始录像
*/
ActionStartRecordParam startRecordParam;
/**
* 结束录像
*/
ActionStopRecordParam stopRecordParam;
/**
* 对焦
*/
ActionFocusParam focusParam;
/**
* 变焦
*/
ActionZoomParam zoomParam;
/**
* 自定义文件或文件夹名
*/
ActionCustomDirNameParam customDirNameParam;
/**
* 开始定时拍
*/
ActionStartTimeLapseParam startTimeLapseParam;
/**
* 结束定时拍
*/
ActionStopTimeLapseParam stopTimeLapseParam;
/**
* 云台旋转
*/
ActionGimbalRotateParam gimbalRotateParam;
/**
* 均匀转云台
*/
ActionGimbalEvenlyRotateParam gimbalEvenlyRotateParam;
/**
* 开始摆拍
*/
ActionStartSmartObliqueParam startSmartObliqueParam;
/**
* 关闭摆拍
*/
ActionStopSmartObliqueParam stopSmartObliqueParam;
/**
* 悬停
*/
ActionAircraftHoverParam aircraftHoverParam;
/**
* 飞机转yaw
*/
ActionAircraftRotateYawParam aircraftRotateYawParam;
/**
* 精准拍照
*/
ActionAccuratePhotoParam accuratePhotoParam;
/**
* 点云开关
*/
ActionRecordPointCloudParam recordPointCloudParam;
/**
* PSDK自定义动作
*/
ActionPSDKParam psdkParam;
/**
* 飞机标定动作
*/
ActionAircraftCaliParam aircraftCaliParam;
/**
* 开始连拍
*/
ActionStartContinuousShootingParam startContinuousShootingParam;
/**
* 结束连拍
*/
ActionStopContinuousShootingParam stopContinuousShootingParam;
/**
* 农业-打开喷洒
*/
ActionSprayOpenParam sprayOpenParam;
/**
* 农业-关闭喷洒
*/
ActionSprayCloseParam sprayCloseParam;
/**
* 农业-定量喷洒
*/
ActionSprayCapacityParam sprayCapacityParam;
/**
* 农业 - 按角速度转yaw
*/
ActionAircraftRotateFollowSpeedParam aircraftRotateFollowSpeedParam;
/**
* 低光智能拍照
*/
ActionLowLightSmartShootingParam lowLightSmartShootingParam;
/**
* 定向拍照
*/
ActionOrientedPhotoParam orientedPhotoParam;
评论
1 条评论
终于写了详细文档了,非常感谢!
请登录写评论。