PSDK摇杆目标高度
Completed环境:
Linux系统,PSDK 3.8.0,无人机为Matrice 3D
PSDK摇杆API 控制控制无人机进行高度下落,存在无人机略过了目标高度后仍在下降的情况
目标高度2米,实际下落时获取相对起飞点高度,发现达到相对高度2米时并未减速且还在下降,大概到1.2米时悬停,想问下可能得原因?
-

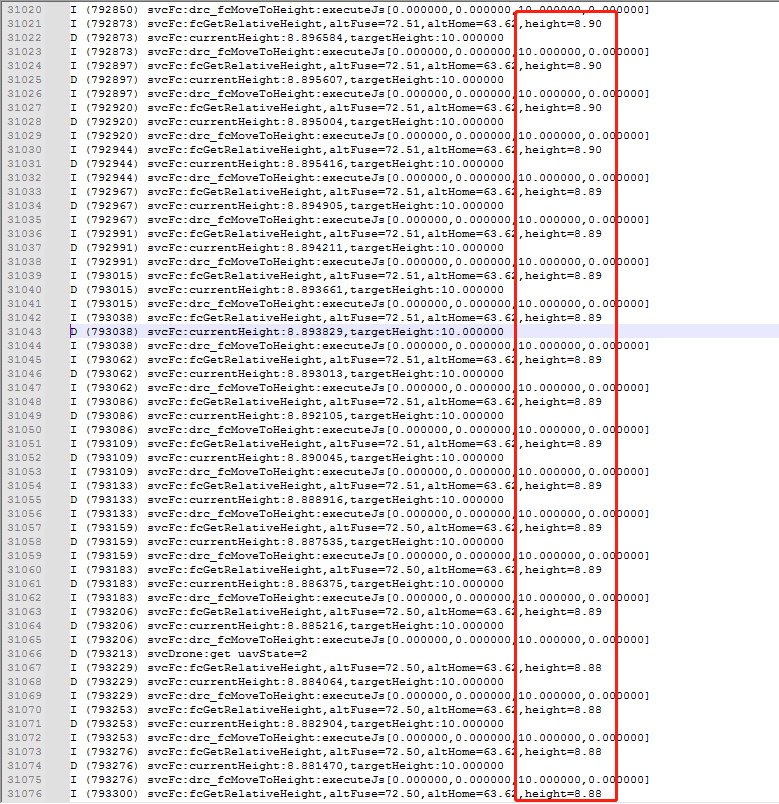
参考psdk的sample使用的topic为
DJI_FC_SUBSCRIPTION_TOPIC_ALTITUDE_OF_HOMEPOINT和DJI_FC_SUBSCRIPTION_TOPIC_ALTITUDE_FUSED,用两者的差值表示相对起飞点高度同时也参考了这篇文章

Please sign in to leave a comment.
Comments
9 comments