【技巧详解】
DJI OSDK提供有 takeoff() API,可以非常方便让飞行器实现电机解锁和起飞。
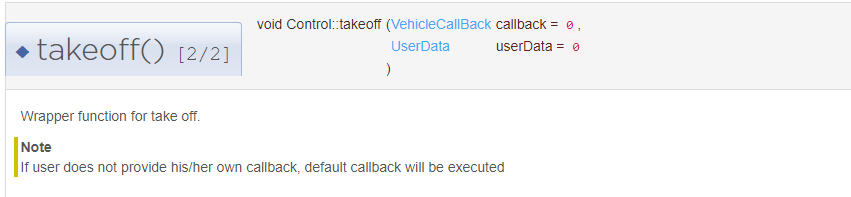
但该API起飞高度恒定为1.2米且不可更改,这对于一些狭小室内/特殊环境的起飞地点来说非常不便。
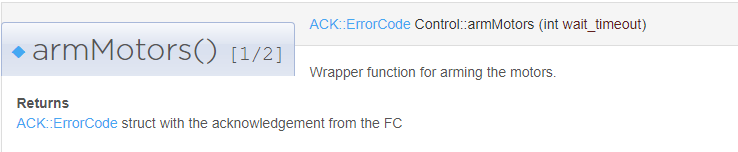
因此我们可以先使用 armMotors() API 来解锁电机。
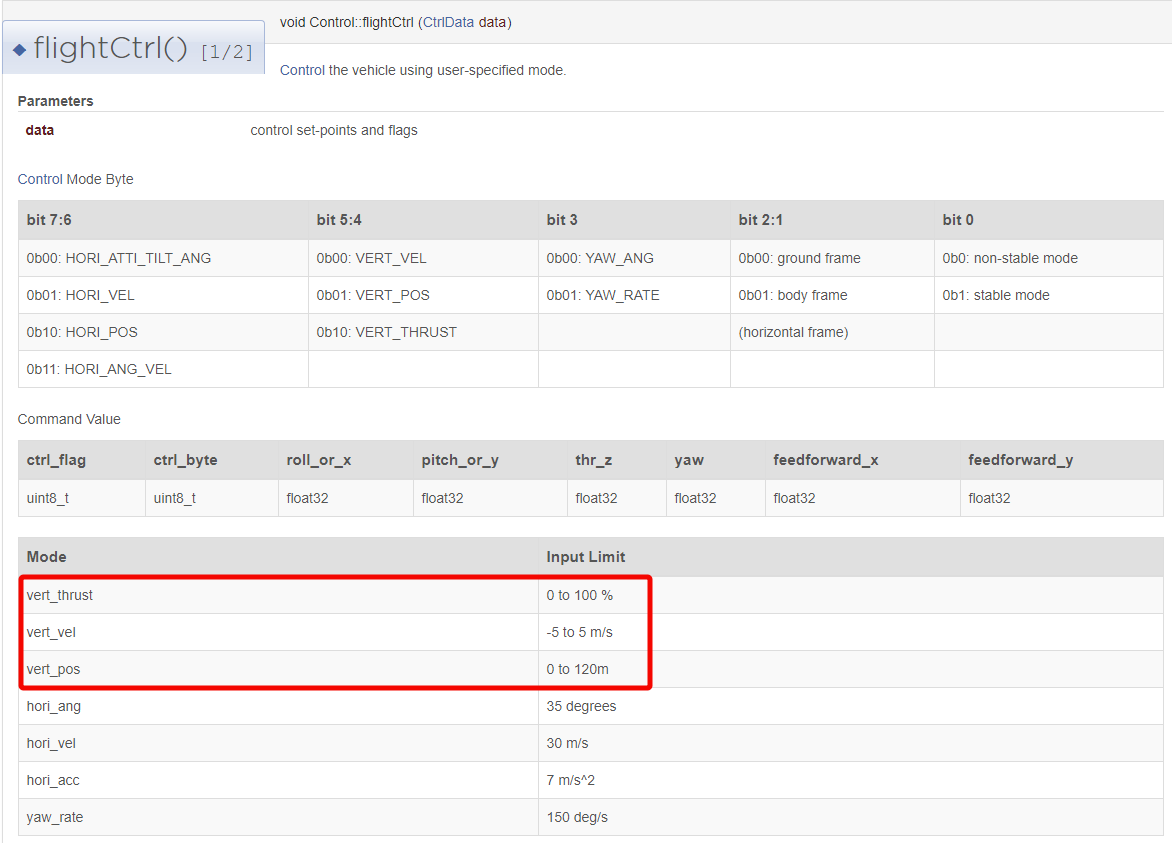
再通过调用 flightCtrl() API 设置垂直方向的位置/推力/速度实现起飞,通过垂直方向的参数实现自定义起飞高度。
此篇文章分享自 Bruce,如果您有什么疑问或者建议欢迎回复讨论~ 欢迎点赞哦!

DJI OSDK提供有 takeoff() API,可以非常方便让飞行器实现电机解锁和起飞。
但该API起飞高度恒定为1.2米且不可更改,这对于一些狭小室内/特殊环境的起飞地点来说非常不便。
因此我们可以先使用 armMotors() API 来解锁电机。
再通过调用 flightCtrl() API 设置垂直方向的位置/推力/速度实现起飞,通过垂直方向的参数实现自定义起飞高度。
此篇文章分享自 Bruce,如果您有什么疑问或者建议欢迎回复讨论~ 欢迎点赞哦!
评论
0 条评论
请登录写评论。