
Keywords: OSDK attitude control, attitude angle control, parameter setting
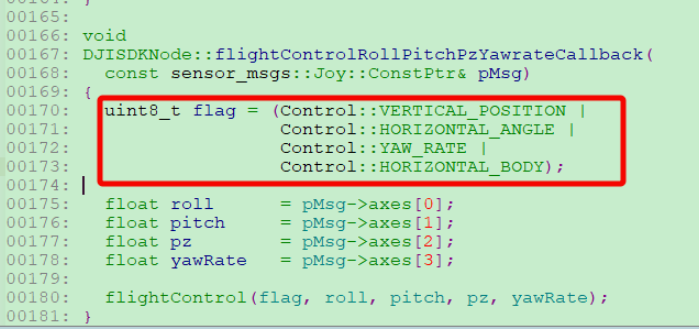
The attitude control API in OSDK ROS is set to STABLE_ENABLE by default. When actually using attitude mode control, it is not recommended to set STABLE_ENABLE in the flag.And please modify the flag parameter in the figure below.
Note: This article is from Chinese and is translated by machine. If there is any suggestions, please point it out and we will correct it in time
Comments
0 comments
Please sign in to leave a comment.