
Keywords: PSDK 3.0, OSDK 5.0, OSDK release
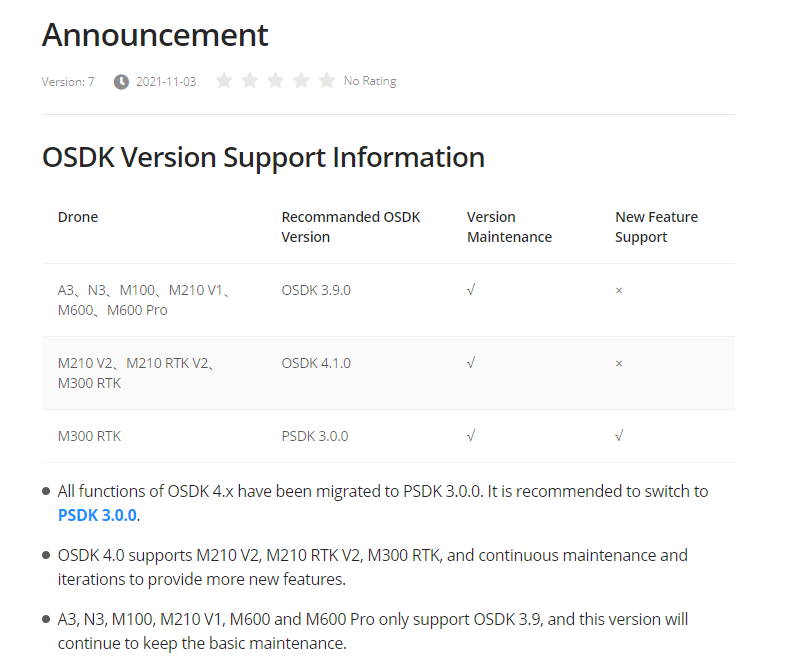
New OSDK version(OSDK 5.0)has been released with intergration to the PSDK 3.0.0
https://developer.dji.com/document/30ac6801-db84-46c2-baf2-8ad8d62bf3ba
PSDK download link:
https://developer.dji.com/payload-sdk/downloads/

The latest version of OSDK(OSDK 5.0) has been integrated with the Payload SDK,that is, the PSDK 3.0.0 add the OSDK functions,developer just need to download the PSDK package, it can be used to develop Payload or Onboard SDK.
If you cannot see the PSDK download page with the developer account you used before, you can select APPLY FOR PAYLOAD SDK on the left, fill in the relevant information according to the prompts, and create a PSDK application, and you can see the Payload SDK column.
一、Configuration
The new version completely adopts the PSDK code configuration method, update the code with your own app info
*File path (take Linux C as an example):
~/Payload_SDK_V3.0.0-build.1433/samples/sample_c/platform/linux/manifold2/application/
*Configuration file:
dji_sdk_app_info.h
*Fill in your own developer information:
#define USER_APP_NAME
#define USER_APP_ID
#define USER_APP_KEY
#define USER_APP_LICENSE
#define USER_DEVELOPER_ACCOUNT
#define USER_BAUD_RATE
Note:
1. Because the ID/KEY of the new version of OSDK(PSDK 3.0) adopts the KEY value of the original PSDK, the KEY of the original OSDK is 64 bytes, and the KEY of PSDK is 32 bytes. Developers who need to use PSDK 3.0 need to recreates a new PSDK application. If it is a newer for PSDK permission, a PSDK application will be activated at the same time.
https://developer.dji.com/user/apps/#all
2. The baud rate for communication between OSDK and UAV in this version is adaptive. It only needs to be defined by the above code: #define USER_BAUD_RATE to set the baud rate, and there is no need to set the UAV baud rate through DJI Assistant2.
3. Comfirming the serial device name and ACM device name. Linux example:
file path:
~/Payload_SDK_V3.0.0-build.1433/samples/sample_c/platform/linux/manifold2/hal/hal_uart.h
For example, after using USB-TTL and double A USB connection, the corresponding serial device name on the onboard computer is
(ls -l /dev | grep "ttyUSB*", ls -l /dev | "grep ttyACM*")
ttyUSB0 and ttyACM0
Corresponding to the OSDK 4.1 configuration file UserConfig.txt
device : /dev/ttyUSB0
acm_port : /dev/ttyACM0
Update the code:
/* Exported constants ---------------------------------------------- ----------*/
//User can config dev based on there environmental conditions
#define LINUX_UART_DEV1 "/dev/ttyUSB0"
#define LINUX_UART_DEV2 "/dev/ttyACM0"
LINUX_UART_DEV1 ---> serial port communication ,
LINUX_UART_DEV2 ---> the dual A USB communication.
二、Device Connections
The use of PSDK 3.0 on the M300, in fact, the hardware connection is no different from the hardware connection of PSDK 2.2.1 and OSDK 4.1.
Here is an explanation:
1. PSDK 3.0 only supports M300 model. For other models, OSDK version 4.1 or OSDK 3.9 is recommended.
2. PSDK 3.0 is used in the OSDK function part. The hardware connection needs to be connected to the OSDK type C interface of the M300, which is expanded into a serial port and a USB port through the OSDK adapter board for the OSDK function.
3. Same as OSDK version 4.1, OSDK interface function uses serial port and USB communication. The serial port must be connected. USB communication is used for waypoint v2, camera manager, gimbal manager, MOP, advance sensing functions.
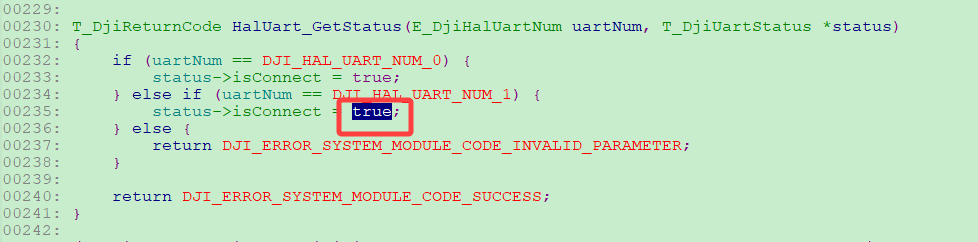
4. If it is only need the serial port to implement simple functions, please update the code:
set "true" to "false"
~/Payload_SDK_V3.0.0-build.1433/samples/sample_c/platform/linux/manifold2/hal
5. PSDK is still connected to the payload gimbal port via skyport/X-PORT. When the program starts, it will automatically recognize whether it is connected to the OSDK extention port or the PSDK payload gimbal port according to the connected port.
三、Compilation
1、unzip Payload_SDK_V3.0.0-build.1433.zip
2、cd Payload_SDK_V3.0.0-build.1433
3、mkdir build
4、cd build
5、cmake ..
6、make
7、cd bin
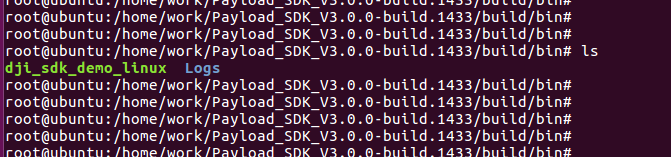
四、Runing Sample
1,./dji_sdk_demo_linux
2、
【2023-03-27】
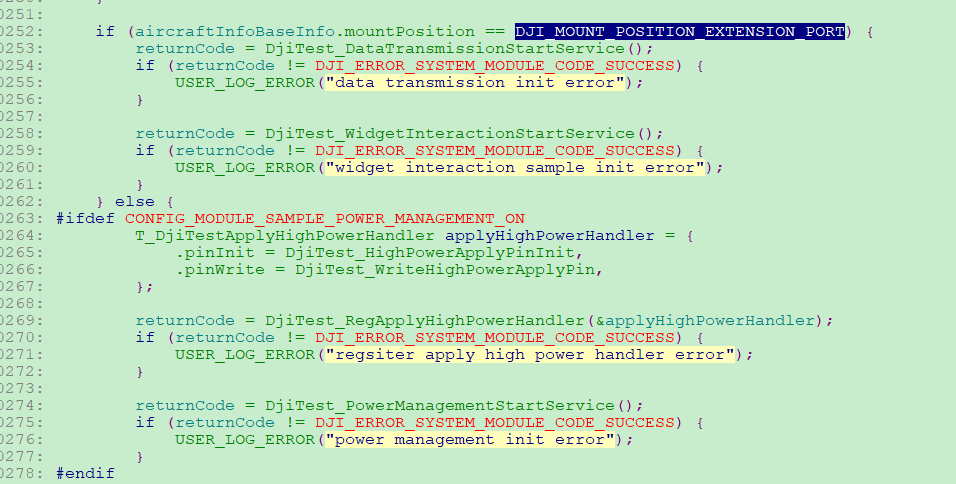
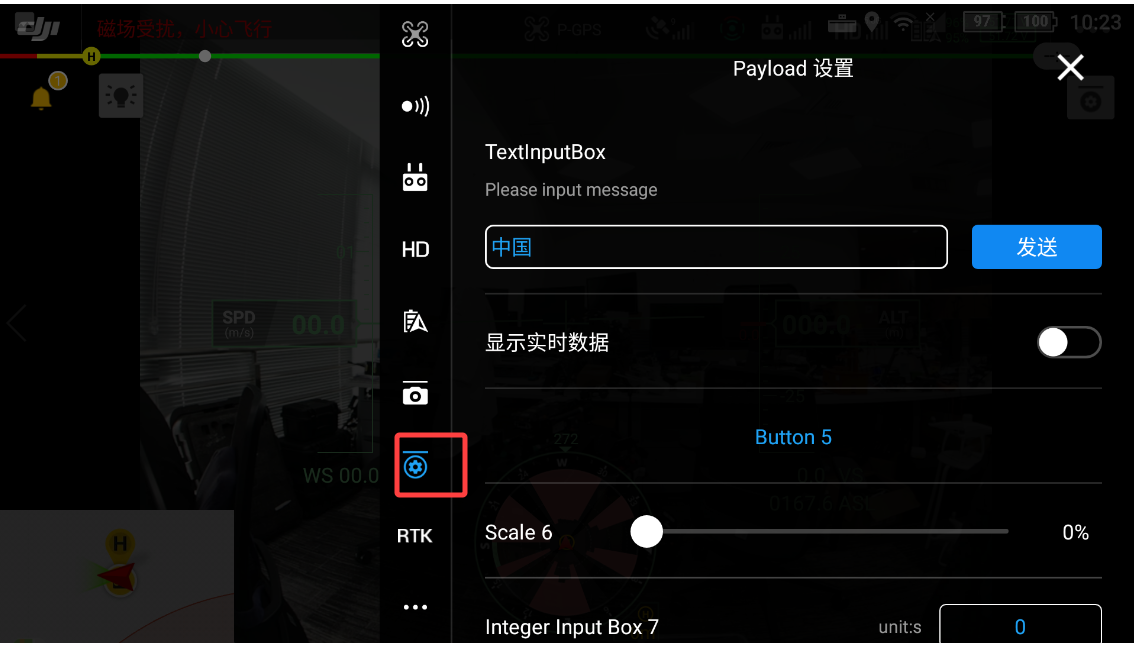
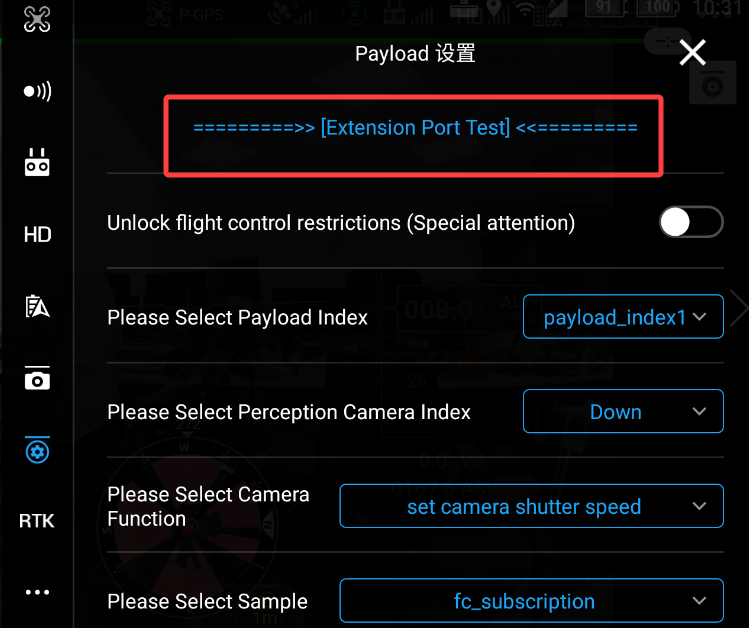
1. The widget in the sample provides two widget demos, and the interactive control is not used by default. If cannot view the OSDK interactive widget on the settings, please check and modify the widget sample through this macro definition.
2. After the release of Pilot 2, the interface of the PSDK control has been adjusted. There is no change in the PSDK function, and the actual Pilot display interface shall prevail.
Comments
0 comments
Please sign in to leave a comment.