PSDK调整角度后,读回的角度数值与预期不符
环境:Linux系统,PSDK 3.9.1,无人机为Matrice 3D
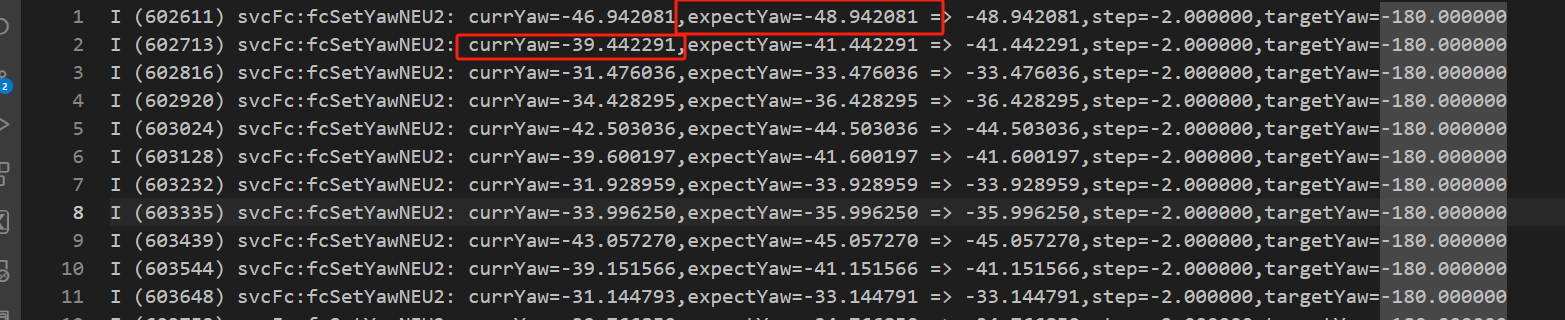
设置无人机的绝对角度时有时会出现转角方向与预期不一致,日志中设置了预期角度,间隔100ms后读回角度变化情况再根据步进设置新的角度
实际发现发现往反方向转角,且现象持续发生
想问时什么原因?
Please sign in to leave a comment.
环境:Linux系统,PSDK 3.9.1,无人机为Matrice 3D
设置无人机的绝对角度时有时会出现转角方向与预期不一致,日志中设置了预期角度,间隔100ms后读回角度变化情况再根据步进设置新的角度
实际发现发现往反方向转角,且现象持续发生
想问时什么原因?
Please sign in to leave a comment.
Comments
5 comments