
使用 SkyPort V2连接运行sample建立连接后报错
Completed
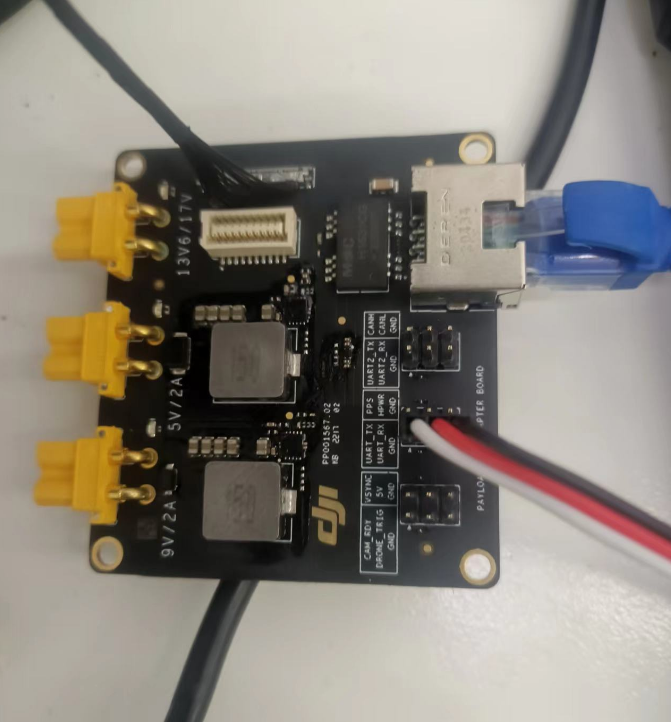
使用M300RTK下云台口接SkyPort V2,然后接payload开发板,再从开发板接UART与网口与linux小型电脑相连,连接如图所示
 在我的小型电脑上运行payload-SDK的sample,按照这个顺序编译运行
在我的小型电脑上运行payload-SDK的sample,按照这个顺序编译运行
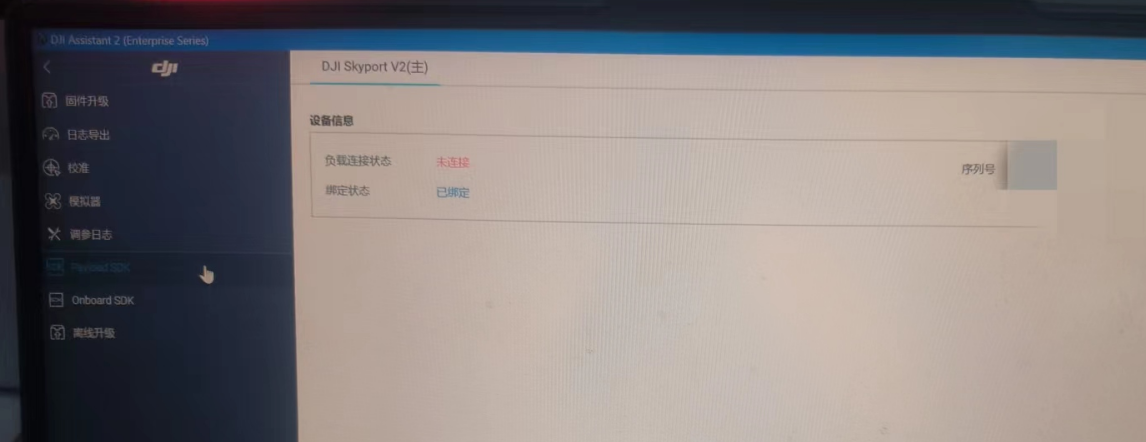
 ,M300RTK通过上方Type-C与主机电脑建立连接,已与SkyPort V2连接
,M300RTK通过上方Type-C与主机电脑建立连接,已与SkyPort V2连接
然后在小型机载电脑上运行payload-SDK的sample时,前面建立连接注册都正常,也识别到了M300与SkyPort V2,但最后报错

这个是个什么问题?
Please sign in to leave a comment.
Comments
4 comments