
消息订阅中传感器信息中,是否能获取得到下视视觉系统和超声波传感器用于确定相对地面的位置?
已完成消息订阅中传感器信息中,是否能获取得到下视视觉系统和超声波传感器用于确定相对地面的位置?
-

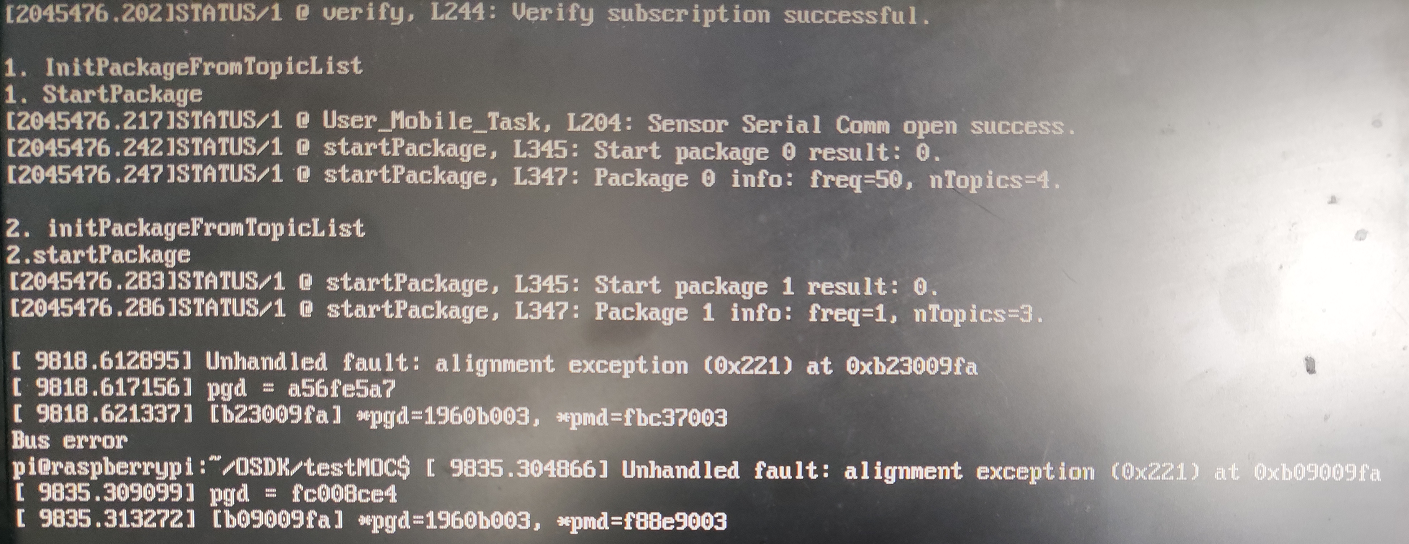
目前测试使用M300, 固件版本2.4.102, osdk版本4.1.0(实际要求飞机固件2.2.102)。 实际测试时,程序可以运行,gps数据或融合数据都能正确取得。但是在增加订阅TOPIC_HEIGHT_FUSION或者TOPIC_ALTITUDE_FUSIONED时,会出现 “unhandle fault: alignment exception (0x221) at 0xb24009fa pgd =3b4e73b3 " “BUS error"等错误。 由于目前飞机无法降级到2.2.102版本,这个错误出现问题是固件版本?还是有其他额外的设置(如DJI assistant2 参数设置)? -
您提供的信息看起来编译器优化有造成字节对齐问题,我这边暂没有ARMv7平台确认这个问题,在X86上用O3优化没有出现这个问题。如果您需要进行优化编译,可以试试将遥测订阅数据结构部分代码去除优化(设置为O0)。 // clang-format on #pragma pack(1) /*! * @brief struct for TopicInfo data used to subscribe packages from the FC */ typedef struct { const TopicName name; const uint32_t uid; const size_t size; /* The size of actual data for the topic */ const uint16_t maxFreq; /* max freq in Hz for the topic provided by FC */ uint16_t freq; /* Frequency at which the topic is subscribed */ uint8_t pkgID; /* Package ID in which the topic is subscribed */ /* Point to topic's address in the data buffer which stores the latest data */ uint8_t* latest; } TopicInfo; // pack(1)

请先登录再写评论。
评论
8 条评论