MSDK虚拟摇杆角度
已完成
你好,我的设备是M350 RTK,通过V5实现了虚拟摇杆角度模式控制俯仰横滚的值,但是文本框中输入的角度和飞机实际执行的角度不一样,这其中有什么关系。
-

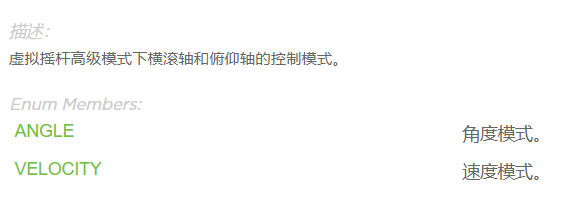
这个角度模式和速度模式分别是怎样控制的 -- 角度模式下,参数对应的是飞机的姿态,但是pitch和roll方向发生角度变化则导致飞机运动,因此我们也会将其描述为角速度模式。 速度模式则是飞机按照您所传输的速度进行运动。因此两个模式都是会使得飞机在水平方向产生运动的。飞机在俯仰和横滚方向上是无法实现是无法固定在某一个角度的。 这篇文章中有给出“高级控制参数的详细用法”,其中有给出不同模式下的pitch和roll的作用:https://sdk-forum.dji.net/hc/zh-cn/articles/8697869415577-%E7%AC%AC%E4%B8%83%E7%AB%A0-%E8%99%9A%E6%8B%9F%E6%91%87%E6%9D%86
请先登录再写评论。
评论
4 条评论