PSDK自动降落过程出现异常转角动作
已完成环境:
PSDK3.8
系统:Linux
无人机:Matrice 3D
在使用PSDK调用自动降落接口后,在大约5m高度处取消自动降落,悬停后开始重新用Joystick控制位移偏移,控制模式为 :
水平:
DJI_FLIGHT_CONTROLLER_HORIZONTAL_POSITION_CONTROL_MODE
垂直:
DJI_FLIGHT_CONTROLLER_VERTICAL_VELOCITY_CONTROL_MODE
转角:
DJI_FLIGHT_CONTROLLER_YAW_ANGLE_RATE_CONTROL_MODE
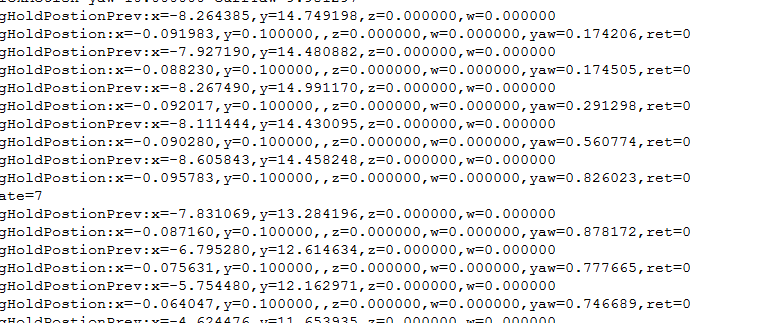
joystick command只对水平方向x,y进行变更,z和w均为0(即转角速度为0),但是实际调用时出现异常转角行为,转角发生较大偏移
想问可能是什么因素导致?
此外,在自动降落过程中,云台向下 并且遥控器提示下方地形不适合降落,那么该意外转角行为是否与降落时的视觉判断有关?
图中 x , y, z, w为控制输入,yaw为通过订阅四元数转换得到欧拉角对应的yaw角(弧度)
-
-

您好,结论如下: 17:34:06s,飞机开机 17:38:56 - 17:39:05,飞机第一次joystick SDK任务,没有控制飞机的yaw,飞机也没有转yaw 17:39:05 - 17:39:29,飞机退出SDK,在N挡飞行,用户打遥控器yaw杆量,飞机yaw从177度转到了145度 17:39:29 - 17:39:54,飞机第二次joystick SDK任务,发指令控制飞机的yaw,先转到了-23度,再转到了0度 17:39:54 - 17:40:02,飞机退出SDK,在N挡飞行,没有控制yaw 17:40:02 - 17:40:10,飞机第三次joystick SDK任务,发指令控制飞机的yaw,转到了57度。 后续是N挡,没进SDK,第一次SDK退出后,飞机有收到yaw杆量,转了yaw,您可以检查下是否出现了误触,或者校准一下摇杆看看是否有偏移。 -

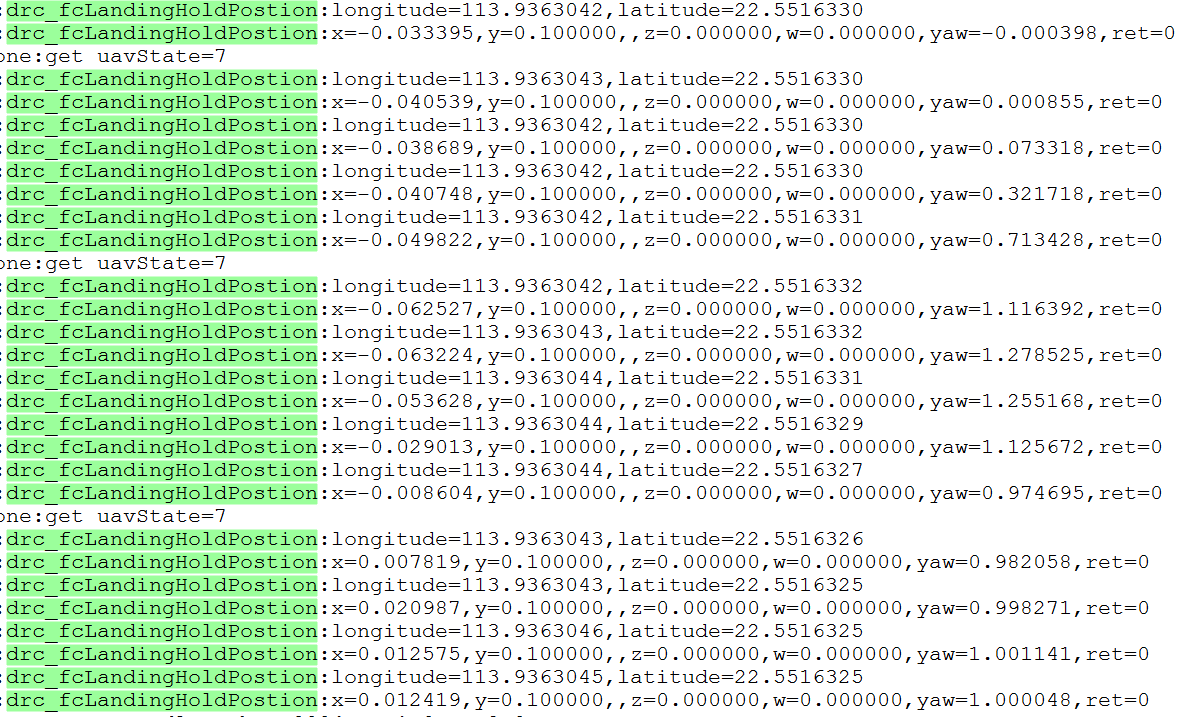
这里的第三次PSDK控制,转到57度那段时间,也就是这边认为存在问题的地方,我重新查看了负载的log日志
跟这个问题帖最初的情况一样,程序中设定的是水平方向位移控制,垂直方向为速度控制,偏航角为角速度控制
T_DjiFlightControllerJoystickMode joystickMode = {
DJI_FLIGHT_CONTROLLER_HORIZONTAL_POSITION_CONTROL_MODE,
DJI_FLIGHT_CONTROLLER_VERTICAL_VELOCITY_CONTROL_MODE,
DJI_FLIGHT_CONTROLLER_YAW_ANGLE_RATE_CONTROL_MODE,
DJI_FLIGHT_CONTROLLER_HORIZONTAL_GROUND_COORDINATE,
DJI_FLIGHT_CONTROLLER_STABLE_CONTROL_MODE_ENABLE,
};日志中w为输入转角速度值,yaw为读取四元数后转换到欧拉角的yaw角值(单位为弧度)
这次飞行中只有57度转角不是负载程序控制的,而分析飞行器日志认为这个57度转角PSDK控制的?
-
您好,您可以上传到此处,后续也可以上传到个人网盘,给我们分享链接即可。 https://pan-sec.djicorp.com/s/H7SsnRE5g5MKZKF
请先登录再写评论。
评论
31 条评论