使用pipeline建立2个通道,如果MSDK只连接了一个通道,在退出后再次启动时,另外个通道就永远也连接不上了,...
Completed
使用pipeline建立2个通道,如果MSDK只连接了一个通道,在退出后再次启动时,另外个通道就永远也连接不上了,必须要2个通道都连接才行。请问怎么优化OSDK的server端
-

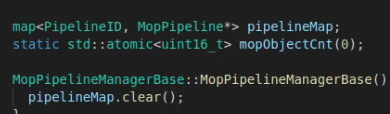
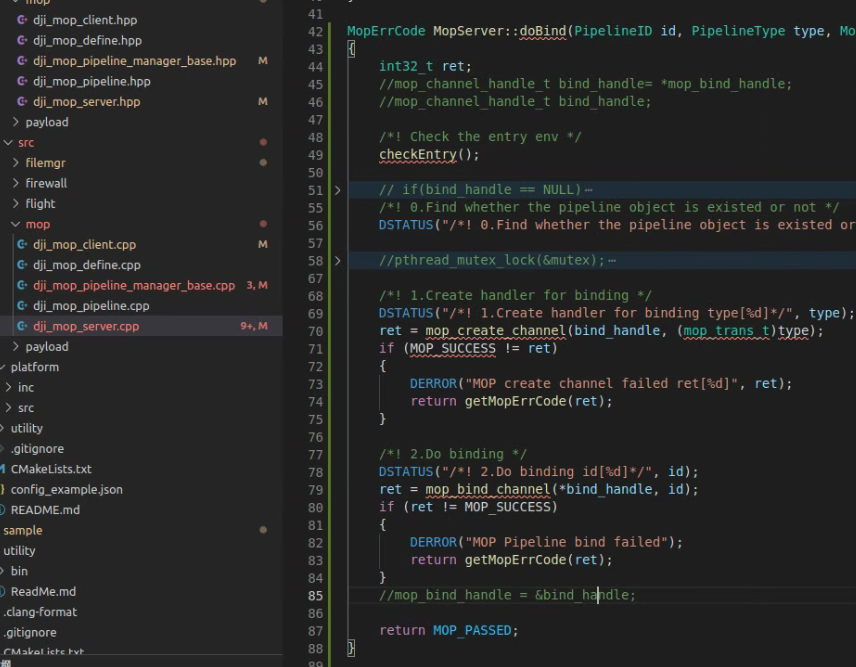
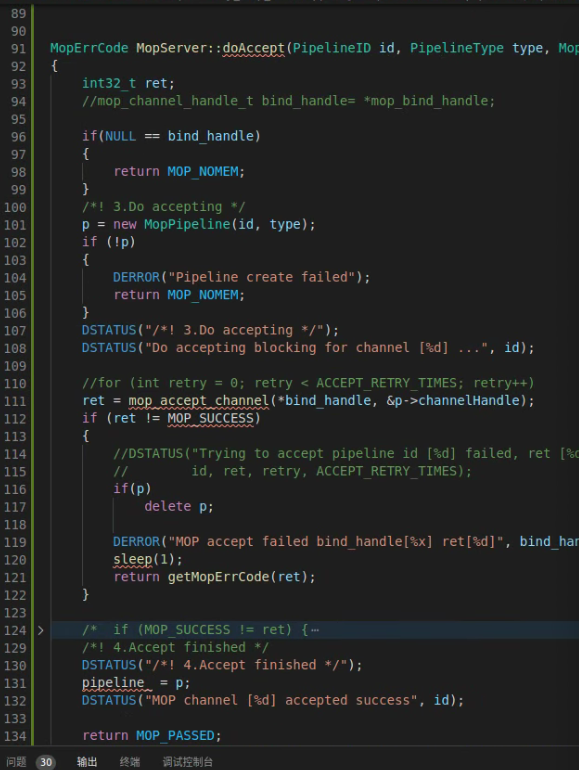
目标设备拒绝连接应该是OSDK没有重新进入accept状态,accept拆分我将部分代码修改放到论坛上了,可以参考: https://bbs.dji.com/thread-303694-1-1.html “使用的 map<> pipeline,多线程同时访问会有冲突吧”这部分代码可以根据实际处理改掉。自己管理pipline,这个可以不要。

Please sign in to leave a comment.
Comments
13 comments