Cannot rotate X-port using PSDK ("semaphore wait timeout")
Completed
Hi all.
I want to control X-Port using PSDK3.0(especially "test_payload_xport.c"), and I implemented the Linux sample code according to this tutorial.
(https://sdk-forum.dji.net/hc/en-us/articles/4408437830041-PSDK-3-0-version-OSDK-OSDK-5-0-introduction-and-guidance )
It works and I can successfully bind my app using DJI Assistant2.
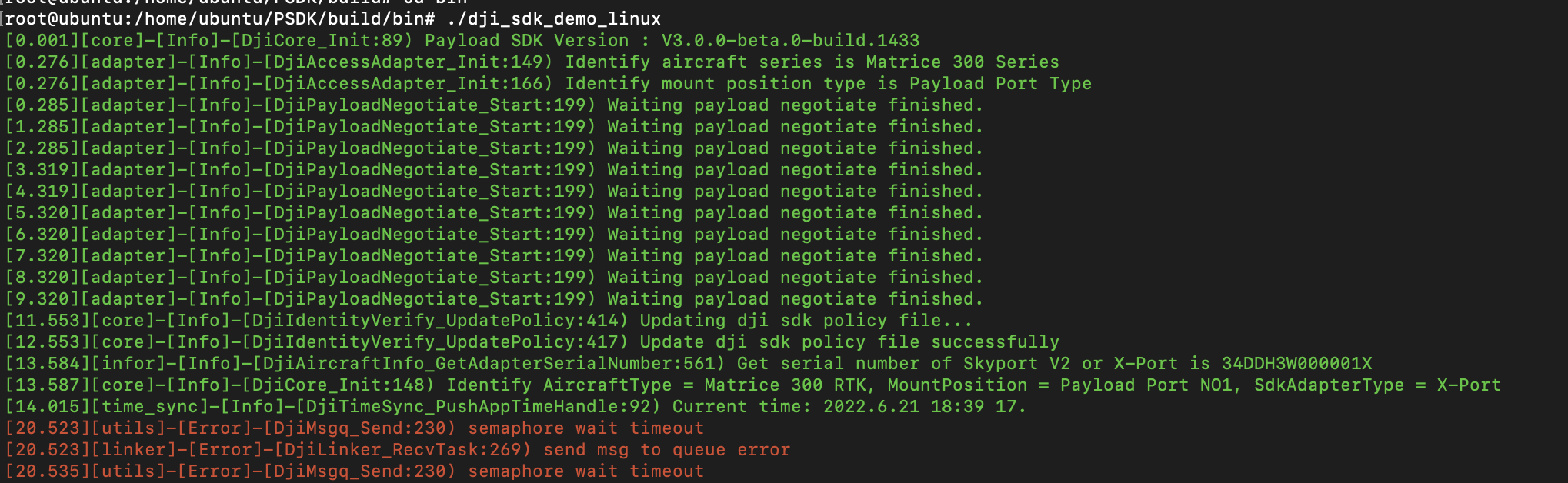
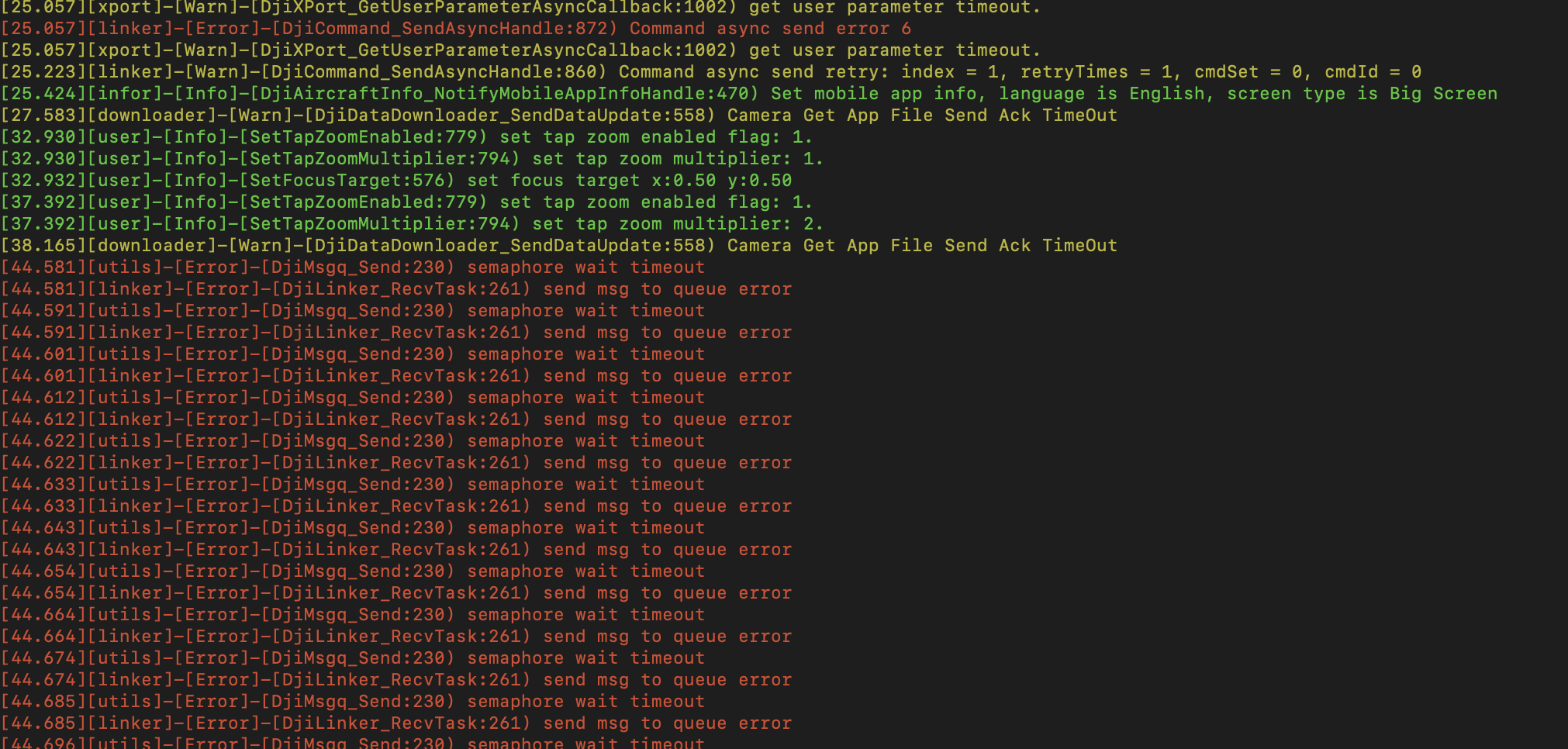
However when I run "sudo ./dji_sdk_demo_linux", it returns "semaphore wait timeout" and the connection between PSDK and remote controller(DJI pilot) is intermittently lost due to an error.
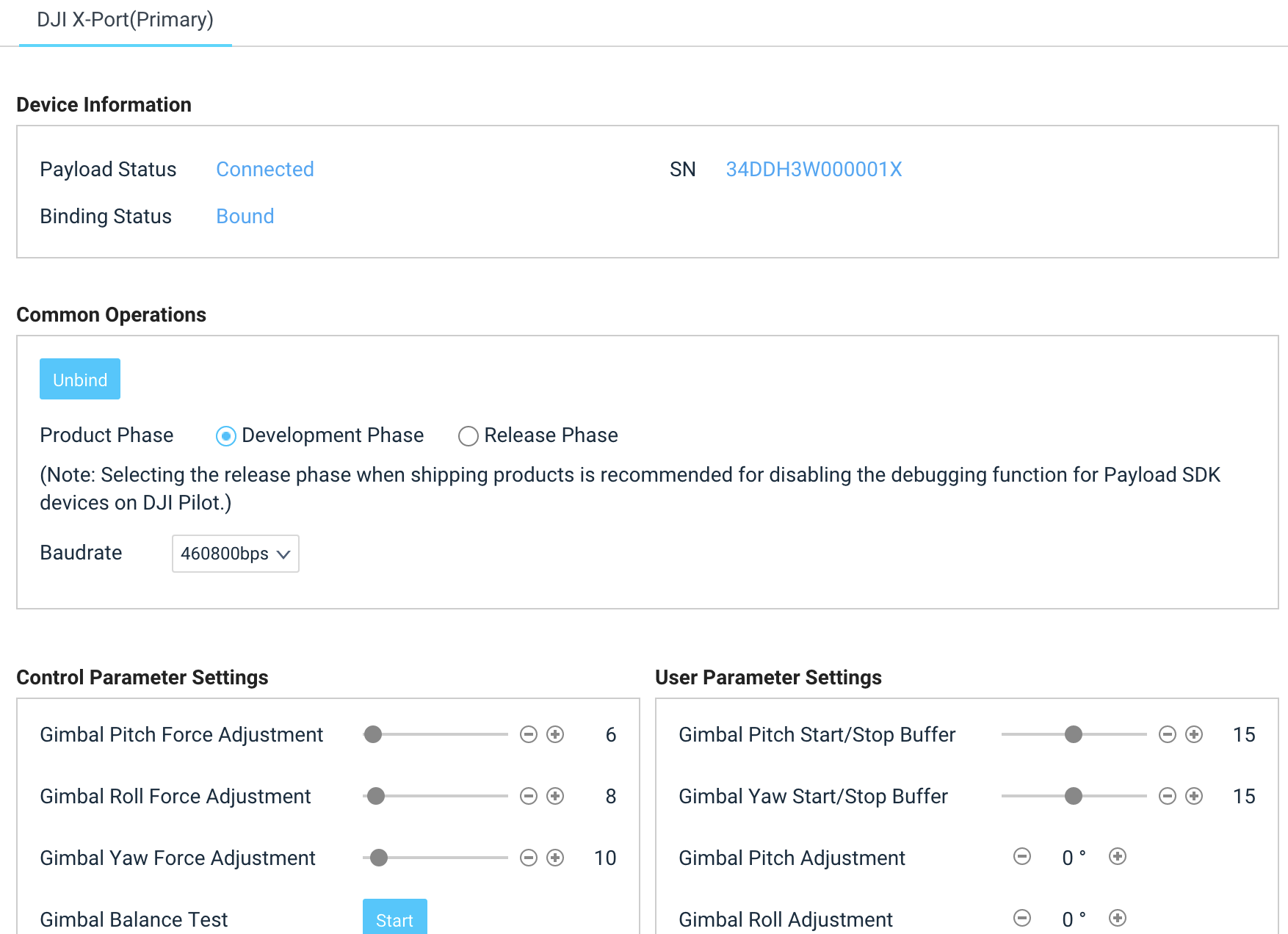
In addition, Payload settings interface in pilot is different from that in tutorial, it only shows "Display Real-time Data".
How can I rotate X-Port using PSDK?
#Device connection
Raspberry pi(Ubuntu16) ------------ PSDK Development Kit 2.0(adapter) ----------------- X-Port ------------ M300RTX

###the screen shot of my terminal when I run sudo ./dji_sdk_demo_linux.

### Firmware version in DJI Assistant2
x-port:v01.03.0200
m300rtk:v03.01.0014
### how to reproduce
0. Connecting Devices.
1. Run sudo ./dji_sdk_demo_linux (according to PSDK tutorial)
2. Bind x-port by DJI Assistant2
3. Activate the DJI Pilot and open "payload settings" menu.
### Picture of DJI Assistant2
Please sign in to leave a comment.
Comments
1 comment