ros dji_vehicle_node.launch in M300 OSDK
Completed
Hi, after running the launch file. There still exist some errors in the process:
[2148544.298]ERRORLOG/1 @ AdvancedSensing, L108: Failed to initialize USB Bulk Linker channel for liveview!
[2148544.298]ERRORLOG/1 @ AdvancedSensing, L115: Failed to create task for liveview!
[2148544.299]ERRORLOG/1 @ AdvancedSensing, L123: Failed to initialize USB Bulk Linker channel for perception!
[2148544.299]ERRORLOG/1 @ AdvancedSensing, L130: Failed to create task for advanced sensing!
[2148544.299]STATUS/1 @ AdvancedSensing, L135: Advanced Sensing init for the M300 drone
[2148544.299]STATUS/1 @ LiveViewImpl, L89: Finding if liveview stream is available now.
[2148545.099]STATUS/1 @ init, L254: Start advanced sensing initalization
[2148545.099]STATUS/1 @ activate, L1329: version 0x3041202
Although these errors do not exist when i run as root user, but how can I resolve these errors even when not in root user mode.
-

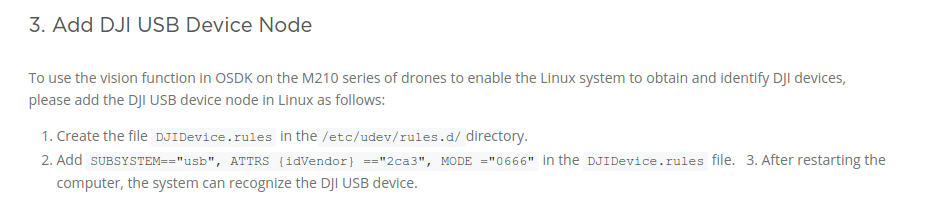
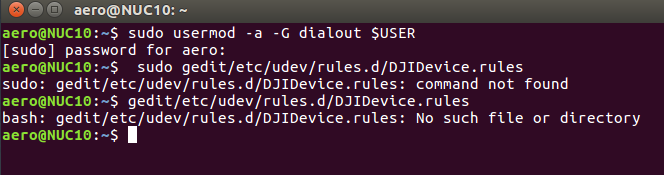
It is about how to add USB node with Ubuntu OS, if you can't add any file, please check the operation permission. 
{kind=link}
Please sign in to leave a comment.
Comments
5 comments