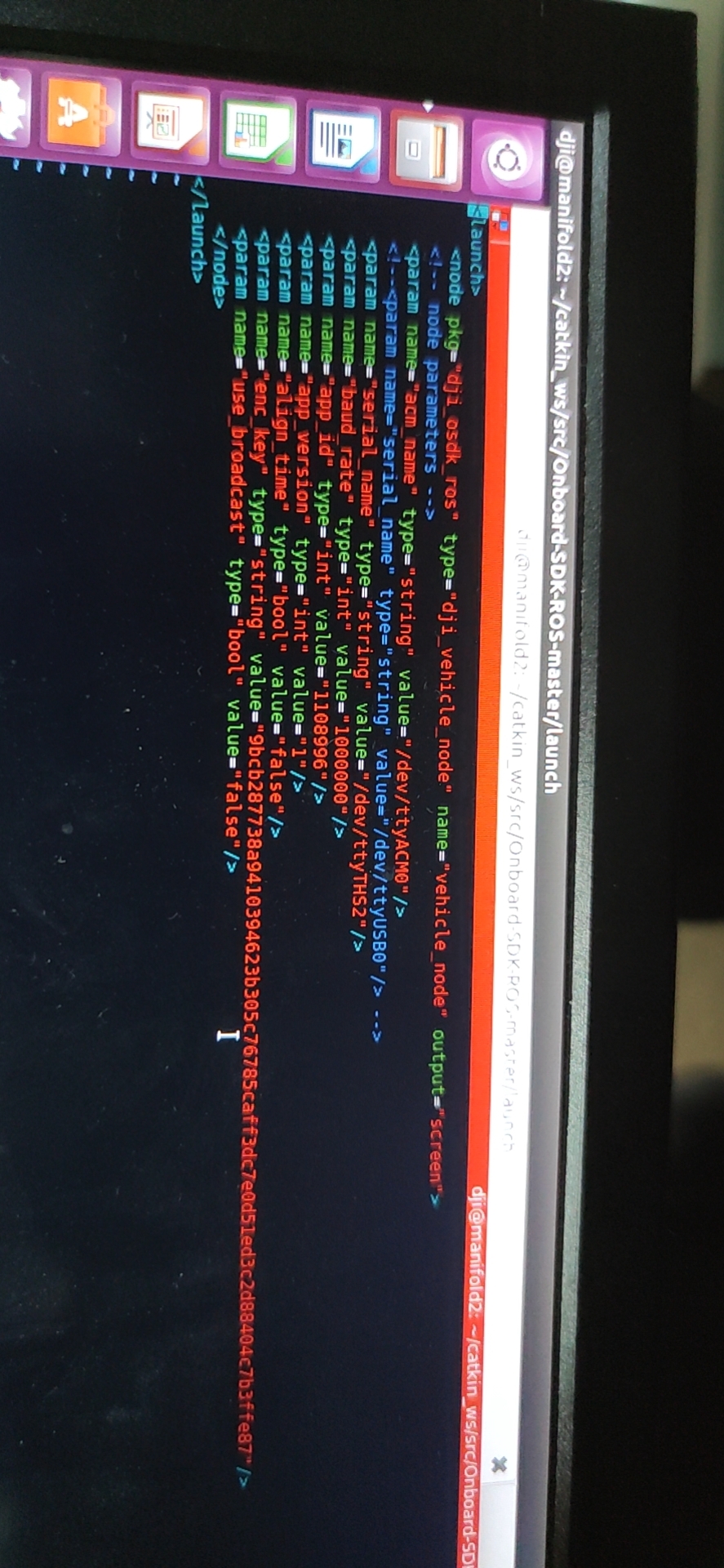
M300 + manifold2-g,启动osdk ros 4.1.0,roslaunch dji_osdk_ros...
Completed-

上面的步骤,我都做到了,应该不是这些的问题吧。
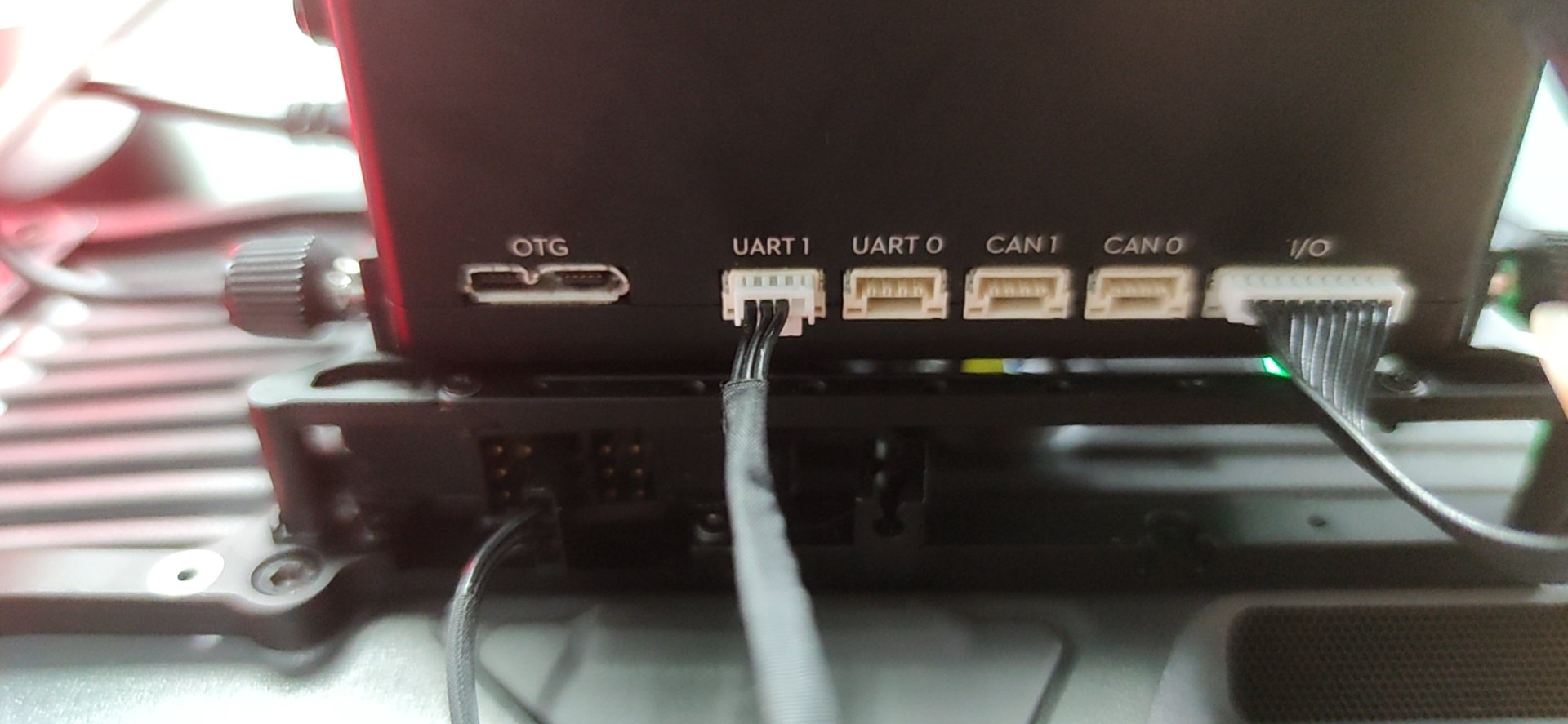
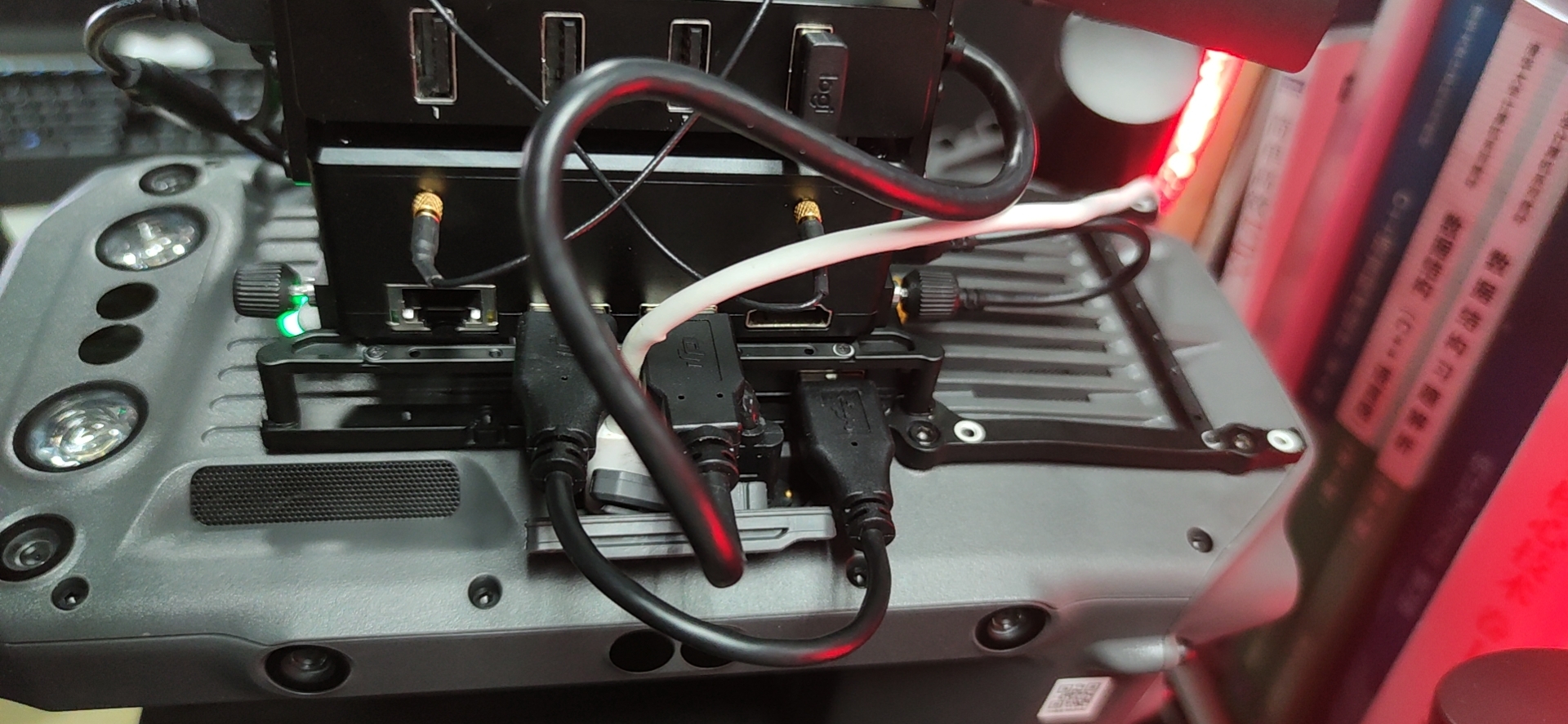
主要是是在启动roslaunch dji_osdk_ros dji_vehicle_node.launch
EnableAd: 1
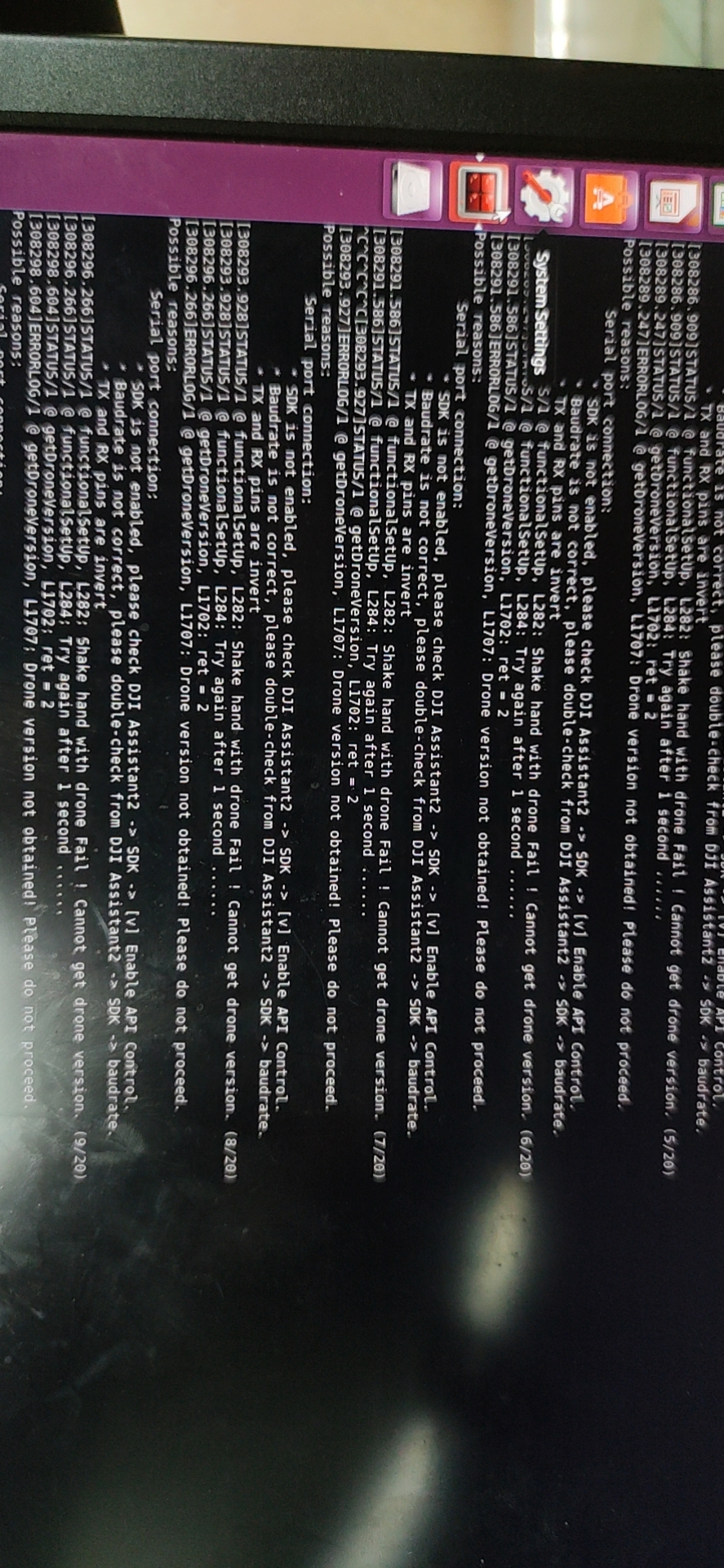
[310176.981]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310176.981]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310176.982]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (1/20)
[310176.982]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310179.331]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310179.332]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310179.332]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (2/20)
[310179.332]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310181.672]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310181.672]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310181.673]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (3/20)
[310181.673]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310184.027]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310184.028]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310184.028]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (4/20)
[310184.028]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310186.369]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310186.369]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310186.369]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (5/20)
[310186.369]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310188.714]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310188.714]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310188.714]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (6/20)
[310188.714]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310191.080]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310191.080]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310191.081]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (7/20)
[310191.081]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310193.432]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310193.433]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310193.433]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (8/20)
[310193.433]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310195.769]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310195.769]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310195.769]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (9/20)
[310195.770]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310198.116]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310198.116]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310198.116]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (10/20)
[310198.116]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310200.463]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310200.464]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310200.464]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (11/20)
[310200.464]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310202.804]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310202.804]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310202.804]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (12/20)
[310202.804]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310205.148]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310205.148]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310205.148]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (13/20)
[310205.148]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310207.501]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310207.501]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310207.501]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (14/20)
[310207.501]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310209.850]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310209.850]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310209.850]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (15/20)
[310209.850]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
[310212.189]STATUS/1 @ getDroneVersion, L1702: ret = 2
[310212.189]ERRORLOG/1 @ getDroneVersion, L1707: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
[310212.189]STATUS/1 @ functionalSetUp, L282: Shake hand with drone Fail ! Cannot get drone version. (16/20)
[310212.189]STATUS/1 @ functionalSetUp, L284: Try again after 1 second ......
... logging to /home/dji/.ros/log/413287fa-1c64-11ec-99c7-a25426ec19b9/roslaunch-manifold2-4830.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
]2;/home/dji/catkin_ws/src/Onboard-SDK-ROS-master/launch/dji_vehicle_node.launch
[1mstarted roslaunch server http://manifold2:32911/[0mSUMMARY
========PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1108996
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 1000000
* /vehicle_node/enc_key: 9bcb287738a941039...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: FalseNODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)auto-starting new master
[1mprocess[master]: started with pid [4840][0m
[1mROS_MASTER_URI=http://localhost:11311[0m
]2;/home/dji/catkin_ws/src/Onboard-SDK-ROS-master/launch/dji_vehicle_node.launch http://localhost:11311
[1msetting /run_id to 413287fa-1c64-11ec-99c7-a25426ec19b9[0m
[1mprocess[rosout-1]: started with pid [4853][0m
started core service [/rosout]
[1mprocess[vehicle_node-2]: started with pid [4861][0m
[vehicle_node-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
[1mdone[0m -

 报错显示串口通信异常,串口通信异常通常与串口硬件与串口设置有关系,可以参考论坛上提供的排查步骤逐一排查设置以及硬件通信部分,可以更换硬件连接模块交叉测试,也可以参考第8点直接使用将飞机(转接板TTL)的引脚连接至PC的串口调试助手上检查飞机(和官方OSDK转接板)的串口输出是否正常。若飞机和OSDK官方转接板串口输出异常,可以申请售后检修硬件。

{kind=link}
Please sign in to leave a comment.
Comments
7 comments