M3TD无人机精准复拍,如何篡改kmz文件里的信息?
Completed
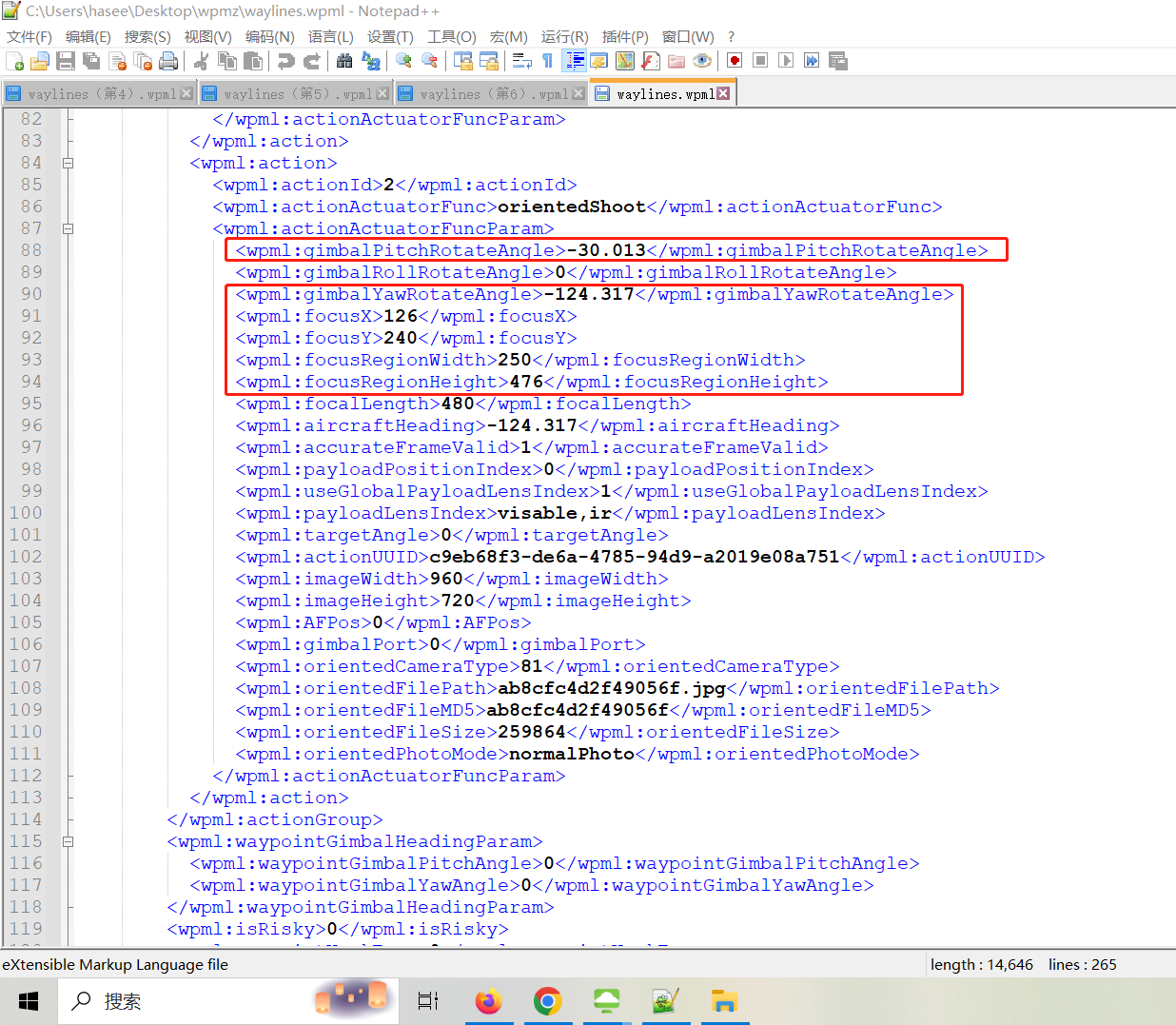
官方你好!下图红框里的几个元素值我实在不知道是怎么算出来的,上云API上面讲解的及其粗糙,只有寥寥几行字,请求详解!
-

尊敬的开发者, 您好,感谢您联系DJI 大疆创新。 抱歉,内置逻辑。这个计算方式暂不对外开放。这边可以大概给您说下这个方法使用,精准复拍会根据提供的照片查找目标值,而这四个参数就是框选出这个照片里的目标范围,您也可以直接全部填最大,这样整个照片都是目标值 pml:focusX 目标选中框中心水平坐标 整型 px (0, 960) *注:照片左上角为坐标原点,水平方向为X轴,竖直方向为Y轴 必需元素 M30/M30T,M3E/M3T,M3D/M3TD wpml:focusY 目标选中框中心竖直坐标 整型 px (0,720) *注:照片左上角为坐标原点,水平方向为X轴,竖直方向为Y轴 必需元素 M30/M30T,M3E/M3T,M3D/M3TD wpml:focusRegionWidth 目标选中框宽 整型 px (0, 960) 必需元素 M30/M30T,M3E/M3T,M3D/M3TD wpml:focusRegionHeight 目标选中框高 整型 px (0, 720) 必需元素 M30/M30T,M3E/M3T,M3D/M3TD 下面这两个参数就是云台的转动角度,也可以随便设置。只是这个航点到执行这个动作时的一个负载姿态 wpml:gimbalPitchRotateAngle 云台Pitch转动角度 浮点型 ° M30/M30T:[-120, 45] M3E/M3T:[-90, 35] M3D/M3TD:[-90, 30] 必需元素 M30/M30T,M3E/M3T,M3D/M3TD wpml:gimbalYawRotateAngle 云台Yaw转动角度 浮点型 ° [-180, 180] *注:M3E/M3T,M3D/M3TD 机型 wpml:gimbalYawRotateAngle 与 wpml:aircraftHeading 需保持一致 必需元素 M30/M30T,M3E/M3T,M3D/M3TD accurateFrameValid这个为1时无人机会自动查找目标 希望我们的解决方案能够帮到您,感谢您的邮件,祝您生活愉快! Best Regards, DJI 大疆创新SDK技术支持
Please sign in to leave a comment.
Comments
9 comments