关于虚拟摇杆的设置偏移量与实际速度的问题
Completed
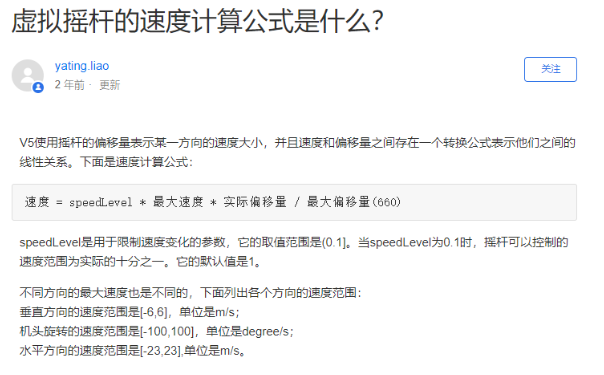
官方之前有提供过虚拟摇杆的计算公式。
目前我主要使用MSDK V5新版的方法:设置虚拟摇杆偏移量来控制飞行。请问这个公式目前还是不变的吗?不同机型之间是否存在偏差?目前我使用的是御3E。
使用RC控制器的摇杆偏移量 和 虚拟摇杆的偏移量是等价的吗(RC控制器的speedLevel是否等于虚拟摇杆speedLevel=1,还是说RC控制器的speedLevel本身也在一直变化?)?比如RC控制器偏移量330持续2秒,使用虚拟摇杆也设置偏移量330持续2秒,最终的效果是一样的吗?如果存在误差的话,大概是多少?
还有关于飞机接受虚拟摇杆偏移量设置的频率是多少?
如果V5的控制方法不够精确的话,我是否该使用V4版本?
-

目前我主要使用MSDK V5新版的方法:设置虚拟摇杆偏移量来控制飞行。请问这个公式目前还是不变的吗?不同机型之间是否存在偏差?目前我使用的是御3E -->这个公式目前是没有变化的。不过MSDK V5在这篇文章发布之后更新了高级虚拟摇杆控制功能,它可以直接传入速度参数:https://sdk-forum.dji.net/hc/zh-cn/articles/8697869415577 使用RC控制器的摇杆偏移量 和 虚拟摇杆的偏移量是等价的吗(RC控制器的speedLevel是否等于虚拟摇杆speedLevel=1)?比如RC控制器偏移量330持续2秒,使用虚拟摇杆也设置偏移量330持续2秒,最终的效果是一样的吗?如果存在误差的话,大概是多少? -->遥控器摇杆和虚拟摇杆之间的杆量是不同的。虚拟摇杆模式下,速度范围都是固定范围。遥控器的杆量会在遥控器的不同档位上有着不同的速度范围。 关于飞机接受虚拟摇杆偏移量设置的频率是多少? -->虚拟摇杆偏移量是没有频率要求的。一旦设置成功,那么飞机就会按照设置的杆量运动。 V5的控制方法不够精确的话,我是否该使用V4版本? -->目前V4所采用的速度参数控制模式,MSDK V5也是支持的,且御3E仅支持MSDK V5.
Please sign in to leave a comment.
Comments
1 comment