获取御3内置指南针数据计算偏航角得到的结果波动达到1.5度
Completed
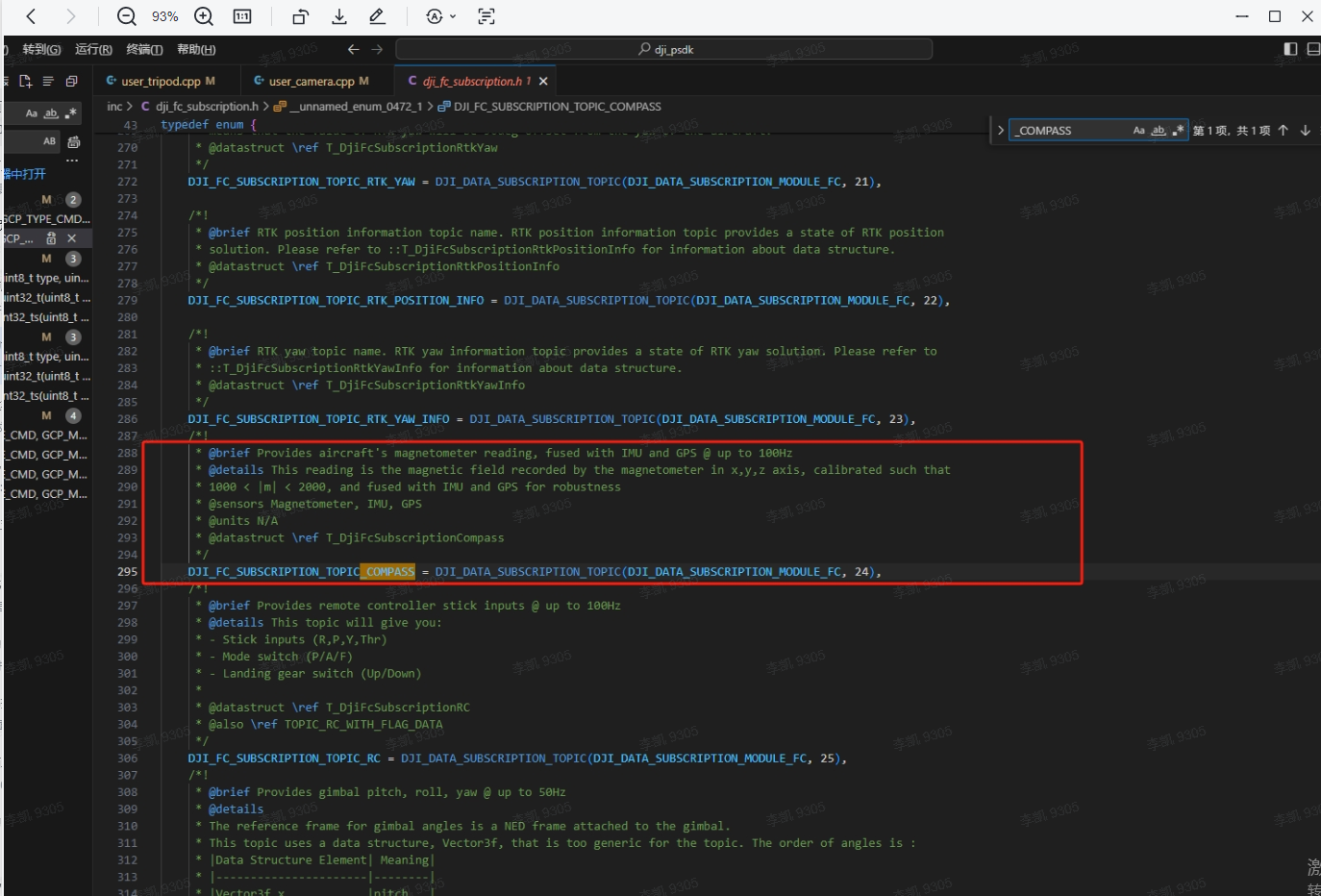
公司现在做一款云台放在御3上,想用御3内置指南针的数据计算角度作为云台的偏航角。现在计算出的偏航角变化趋势正确,但是静止是波动范围达1.5度,无法使用、
计算方法:
mn为御3的指南针数据,数据获取频率为50Hz,euler_test[2] 为计算得到的偏航角
euler_test[2] = R2D(atan2(mn[1], mn[0]));
请大疆研发大佬给出指导
Please sign in to leave a comment.
Comments
7 comments