Disabling Braking While Preserving Sensor Functionality on M300/M350
Completed
Hello,
I am currently working with Mobil Android SDK 5 on the M300/M350 models and have encountered a scenario where I need to disable the braking functionality while still maintaining the use of the sensors. Is there a recommended approach or configuration within the SDK that would allow for this?
Thank you for your assistance.
Best regards,
Victor
-
Thank you for bringing up this detail regarding the deactivation of obstacle avoidance via the MSDK v5 interface. As you've correctly noted, I am currently disabling the obstacle avoidance feature by setting setObstacleAvoidanceType to CLOSE. However, I've encountered an issue where, upon setting the type to CLOSE, I no longer receive the obstacle sensor values, specifically ObstacleData. My goal is to continue receiving ObstacleData, even while the ObstacleAvoidanceType is set to CLOSE. Would you have any suggestions or insights on how this can be achieved ?
-

I apologize for keeping you waiting for so long. We have checked that in Mobile SDK V5, obstacles distance data is not rejected when the avoidance type is CLOSE. From this perspective, it seems that Mobile SDK V5 currently cannot achieve obstacle data retrieval while avoiding obstacles. However, this functionality can be achieved in Mobile SDK V4. If you do not have plans to use L2 and third-party developed devices, you may consider using Mobile SDK V4. -
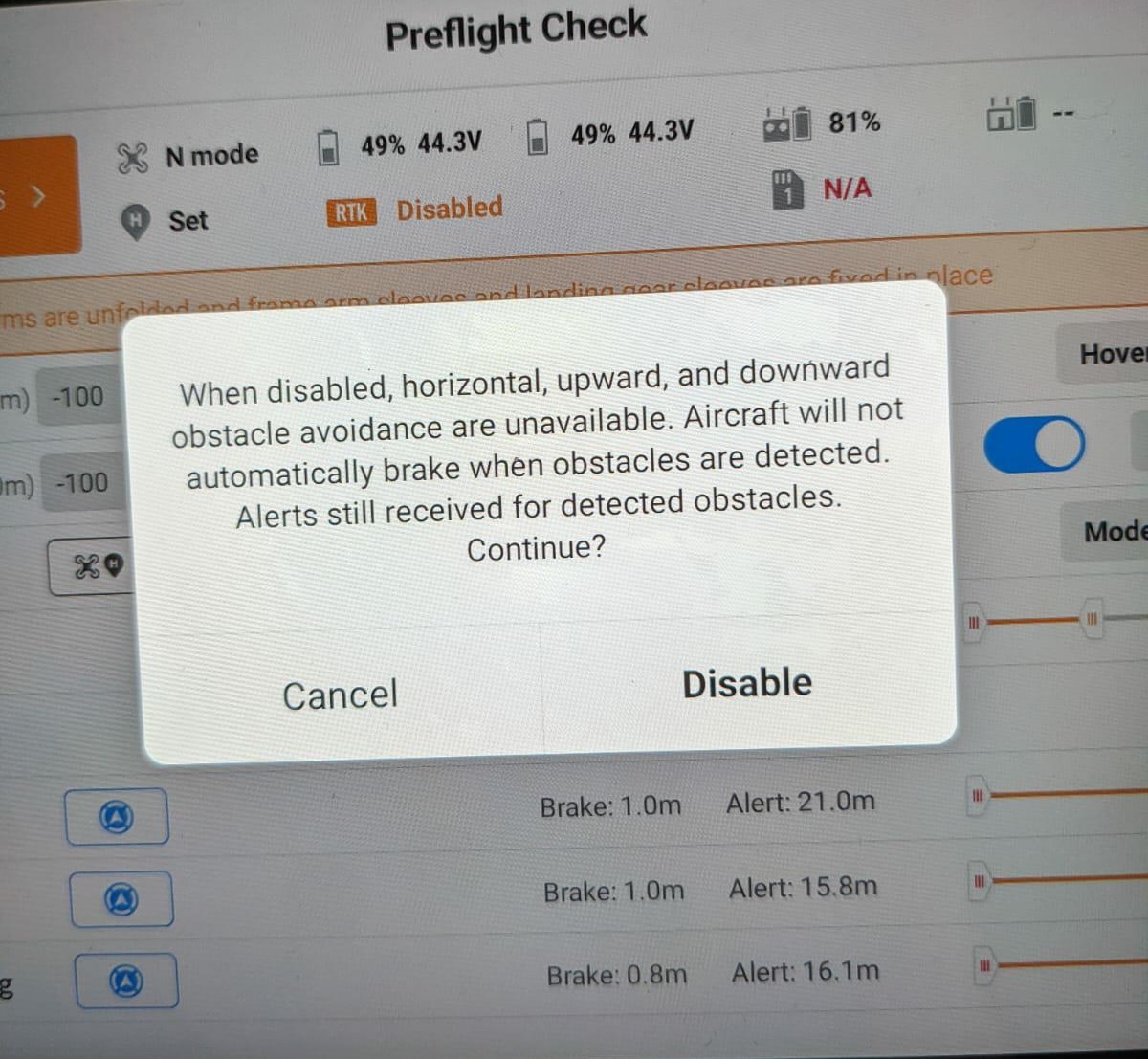
The warning mentioned in this pop-up window, I believe, should be the warning information provided by Pilot 2. However, we are currently not sure how Pilot 2 implements warnings. Do you want to implement similar functionality? I can try to inquire, but the methods used by Pilot 2 may not necessarily be applicable to MSDK V5. -
We are just wondering if there is a way to 1) disable the braking of the M300 while 2) keep receiving the distances through the PerceptionInformationListener.
From our testing, it looks like we no longer receive any data as soon as we disable the horizontal avoidance (`setObstacleAvoidance(false, PerceptionDirection.HORIZONTAL)`) or the global one (`setOverallObstacleAvoidance(false)`)
It seems that the issue doesn't happen on the Mavic 3E.
-
I apologize for keeping you waiting for such a long time. The issue is currently on progress. We have identified the key to obtain obstacle avoidance data when closing the obstacle avoidance. You can use FlightAssistantKey.KeyOmnidirectionalRadarStatus to retrieve obstacle avoidance data for now. -
The issue has been resolved in version 5.10 alpha. If it has a significant impact on you, you may consider using the interface mentioned earlier or updating to this version. https://github.com/dji-sdk/Mobile-SDK-Android-V5/tree/dev-sdk-alpha
Please sign in to leave a comment.
Comments
10 comments