航线指令超时
Completed
msdk 5.6.0版本调用WaypointMissionManager.getInstance().startMission()执行航线飞行任务,错误信息为 errorType='WAYPOINT'errorCode='SEND_PACK_TIMEOUT'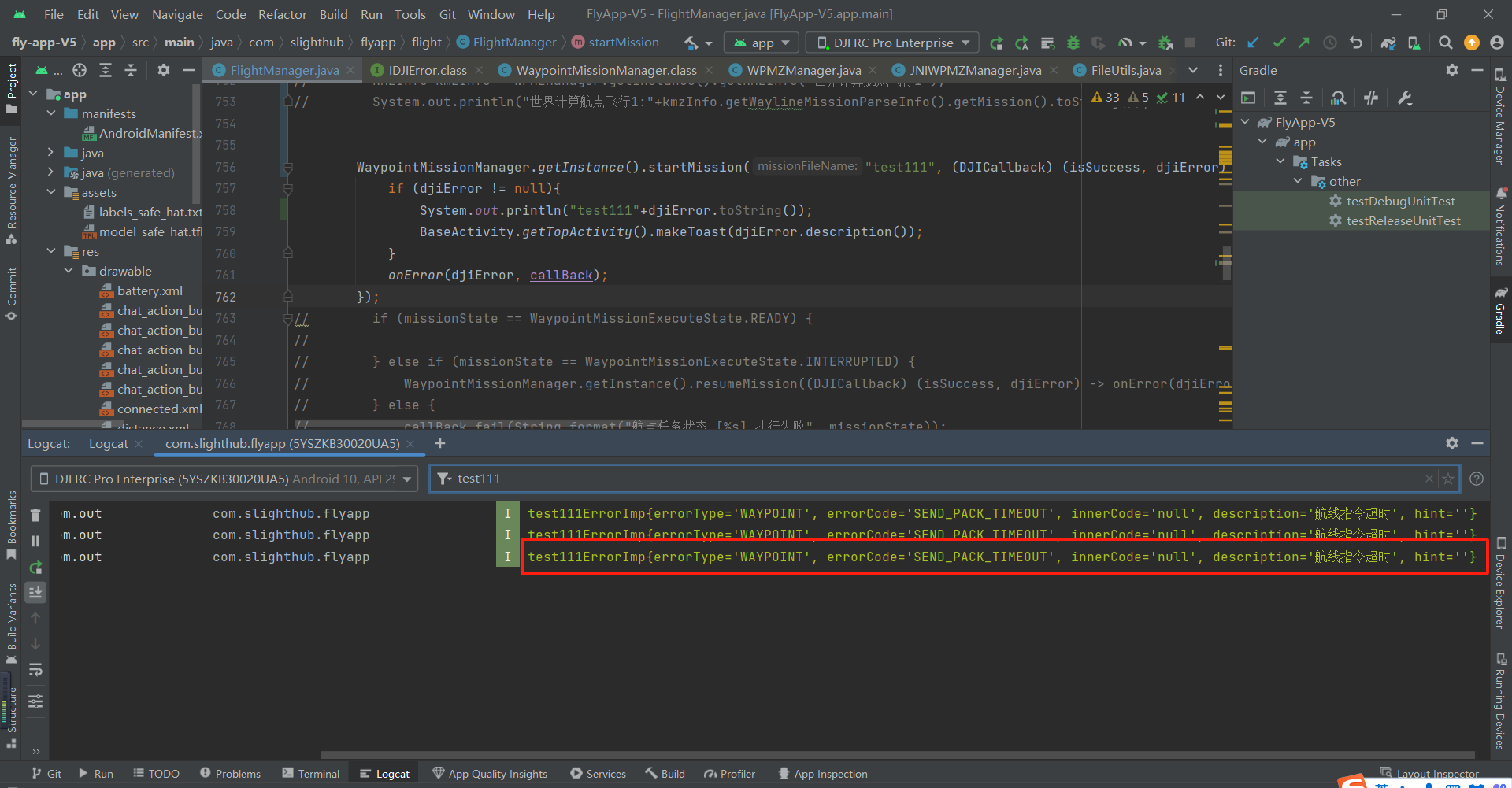
-
<?xml version="1.0" encoding="UTF-8"?>
<kml xmlns="http://www.opengis.net/kml/2.2" xmlns:wpml="http://www.dji.com/wpmz/1.0.4">
<Document>
<wpml:missionConfig>
<wpml:flyToWaylineMode>safely</wpml:flyToWaylineMode>
<wpml:finishAction>goHome</wpml:finishAction>
<wpml:exitOnRCLost>executeLostAction</wpml:exitOnRCLost>
<wpml:executeRCLostAction>goBack</wpml:executeRCLostAction>
<wpml:takeOffSecurityHeight>20</wpml:takeOffSecurityHeight>
<wpml:globalTransitionalSpeed>15</wpml:globalTransitionalSpeed>
<wpml:droneInfo>
<wpml:droneEnumValue>77</wpml:droneEnumValue>
<wpml:droneSubEnumValue>2</wpml:droneSubEnumValue>
</wpml:droneInfo>
<wpml:payloadInfo>
<wpml:payloadEnumValue>68</wpml:payloadEnumValue>
<wpml:payloadSubEnumValue>0</wpml:payloadSubEnumValue>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
</wpml:payloadInfo>
</wpml:missionConfig>
<Folder>
<wpml:templateId>0</wpml:templateId>
<wpml:executeHeightMode>WGS84</wpml:executeHeightMode>
<wpml:waylineId>0</wpml:waylineId>
<wpml:distance>38.6466445922852</wpml:distance>
<wpml:duration>12.1198120117188</wpml:duration>
<wpml:autoFlightSpeed>5</wpml:autoFlightSpeed>
<Placemark>
<Point>
<coordinates>
112.827730757658,28.2371695505852
</coordinates>
</Point>
<wpml:index>0</wpml:index>
<wpml:executeHeight>71.554328918457</wpml:executeHeight>
<wpml:waypointSpeed>5</wpml:waypointSpeed>
<wpml:waypointHeadingParam>
<wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode>
<wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle>
<wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint>
<wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable>
<wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex>
</wpml:waypointHeadingParam>
<wpml:waypointTurnParam>
<wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode>
<wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist>
</wpml:waypointTurnParam>
<wpml:useStraightLine>1</wpml:useStraightLine>
<wpml:waypointGimbalHeadingParam>
<wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle>
<wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle>
</wpml:waypointGimbalHeadingParam>
<wpml:isRisky>0</wpml:isRisky>
</Placemark>
<Placemark>
<Point>
<coordinates>
112.827843318209,28.2368979935745
</coordinates>
</Point>
<wpml:index>1</wpml:index>
<wpml:executeHeight>75.8543319702148</wpml:executeHeight>
<wpml:waypointSpeed>5</wpml:waypointSpeed>
<wpml:waypointHeadingParam>
<wpml:waypointHeadingMode>smoothTransition</wpml:waypointHeadingMode>
<wpml:waypointHeadingAngle>153</wpml:waypointHeadingAngle>
<wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint>
<wpml:waypointHeadingAngleEnable>1</wpml:waypointHeadingAngleEnable>
<wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode>
<wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex>
</wpml:waypointHeadingParam>
<wpml:waypointTurnParam>
<wpml:waypointTurnMode>toPointAndPassWithContinuityCurvature</wpml:waypointTurnMode>
<wpml:waypointTurnDampingDist>2.07140584236119</wpml:waypointTurnDampingDist>
</wpml:waypointTurnParam>
<wpml:useStraightLine>1</wpml:useStraightLine>
<wpml:waypointGimbalHeadingParam>
<wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle>
<wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle>
</wpml:waypointGimbalHeadingParam>
<wpml:isRisky>0</wpml:isRisky>
</Placemark>
<Placemark>
<Point>
<coordinates>
112.827902557686,28.2368780077099
</coordinates>
</Point>
<wpml:index>2</wpml:index>
<wpml:executeHeight>75.8543243408203</wpml:executeHeight>
<wpml:waypointSpeed>5</wpml:waypointSpeed>
<wpml:waypointHeadingParam>
<wpml:waypointHeadingMode>smoothTransition</wpml:waypointHeadingMode>
<wpml:waypointHeadingAngle>93</wpml:waypointHeadingAngle>
<wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint>
<wpml:waypointHeadingAngleEnable>1</wpml:waypointHeadingAngleEnable>
<wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode>
<wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex>
</wpml:waypointHeadingParam>
<wpml:waypointTurnParam>
<wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode>
<wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist>
</wpml:waypointTurnParam>
<wpml:useStraightLine>1</wpml:useStraightLine>
<wpml:waypointGimbalHeadingParam>
<wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle>
<wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle>
</wpml:waypointGimbalHeadingParam>
<wpml:isRisky>0</wpml:isRisky>
</Placemark>
</Folder>
</Document>
</kml>
Please sign in to leave a comment.
Comments
7 comments