The drone's data transmission via the Onboard SDK (OSDK) ceases after a few minutes of operation.
Completed
The primary functionality of the DJI Matrice 600 (M600) drone application involves initializing a mission comprising two waypoints, along with incorporating mission actions and Return-to-Home (RTH) procedures. Notably, this application demonstrates successful performance within the DJI Assistance 2 for Matrice software environment.
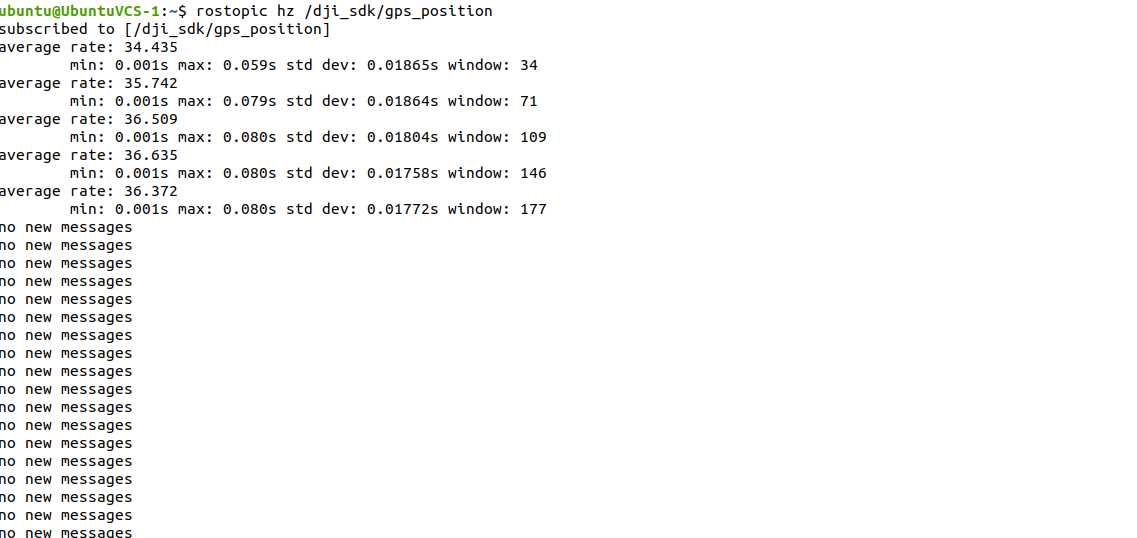
However, when attempting to monitor the drone's communication via the dji_sdk topics using the rostopic echo command, no data is observed being published. Additionally, upon evaluating the data transmission rate, the status indicates "no new message.
-

Dear Developer, Hello, thank you for contacting DJI. You can check like this: Add printing to the subscription function of the master node to check whether the message from the drone can be successfully received in the master node. Thank you for your support of DJI products. Best Regards, DJI Dajiang innovation SDK technical support -
Hi,
The data obtained from the master node (/dji_sdk) on the drone is normal for maybe 1-2 minutes. (I just did roslaunch dji_sdk sdk.launch instead of my launch file.) Then, it stops publishing value after a few minutes, and also the data transmission rate becomes 'no new message'. This is similar to my problem.
Best Regards,
Jenita Jerard Kattuparembil -
Have you had a chance to try out the OSDK ROS demo directly? It would be great if you could add a log print to the code mentioned in the demo.(https://github.com/dji-sdk/Onboard-SDK-ROS/blob/705d9c364858497e4ddecae5b7d9d168fa8c1b5b/dji_sdk/src/modules/dji_sdk_node_publisher.cpp#L354C40-L354C40) This will help us in analyzing the issue more effectively. Once you have the complete running log of the master node, please provide it to us so that we can further confirm it.
Please sign in to leave a comment.
Comments
3 comments