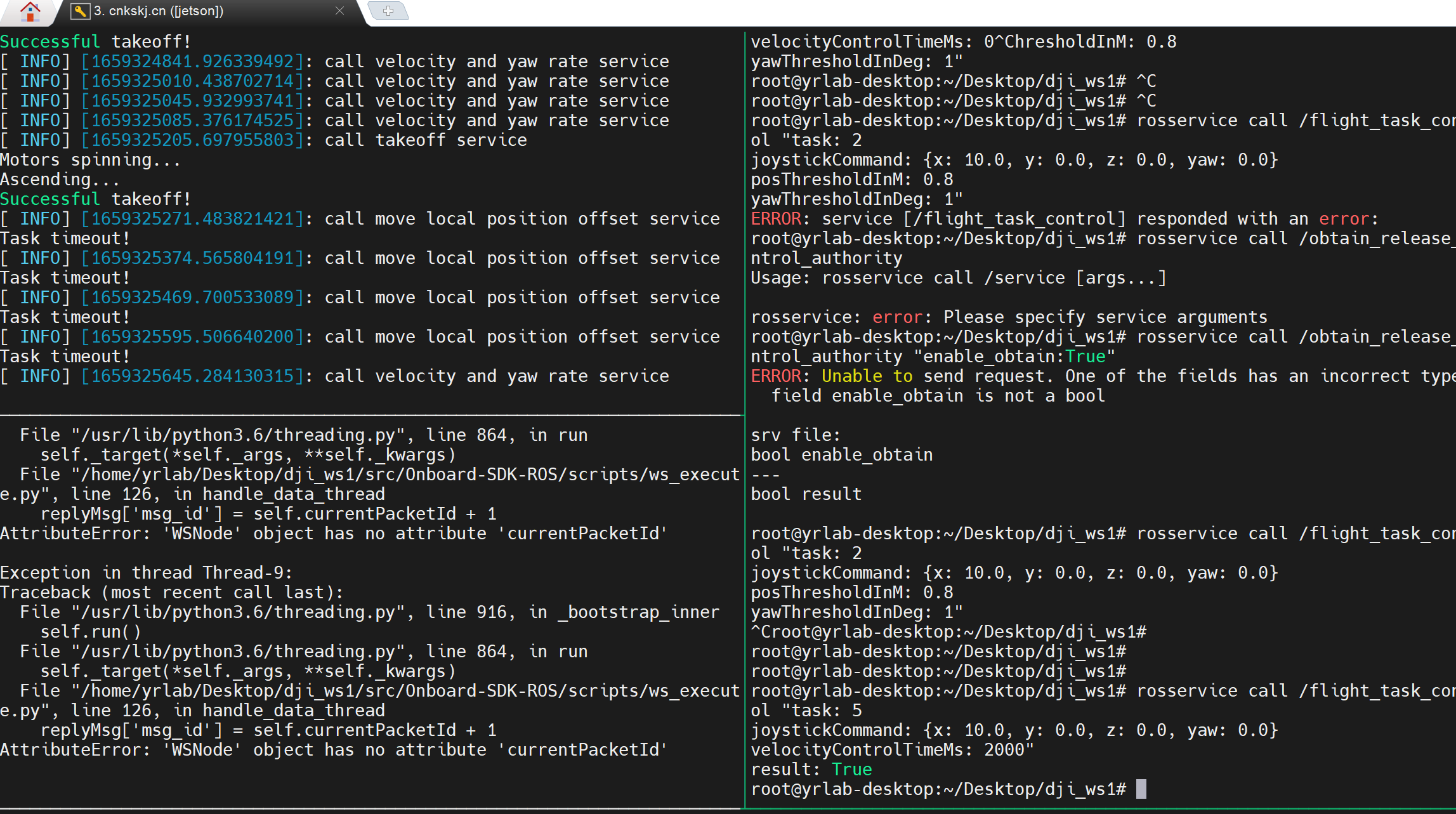
使用ROS包时call flight task control 时给了参数,主节点也显示call了服务,仿真时飞机可...
已完成使用ROS包时call flight task control 时给了参数,主节点也显示call了服务,仿真时飞机可以起飞但是无法移动。
-

检查一下遥控器是否有设置限飞区域,限飞距离不能小于30m。 

{kind=link}
请先登录再写评论。
评论
2 条评论