
DJI Assistant 2 模拟器中代码控制起飞失败
已完成
飞机为 M210V2 固件版本为 V01.00.0710
OSDK 版本为4.1.0 OSDK-ROS 版本为4.1.0
使用manifold 2G作为机载平台,Xmanager和Xshell软件进行远端调试
终端中运行语句
roslaunch dji_osdk_ros dji_vehicle_node.launch
得到结果
Xshell 7 (Build 0056)
Copyright (c) 2020 NetSarang Computer, Inc. All rights reserved.
Type `help' to learn how to use Xshell prompt.
[C:\~]$
Connecting to 192.168.1.101:22...
Connection established.
To escape to local shell, press 'Ctrl+Alt+]'.
Welcome to Ubuntu 16.04.7 LTS (GNU/Linux 4.4.38+ aarch64)
* Documentation: https://help.ubuntu.com
* Management: https://landscape.canonical.com
* Support: https://ubuntu.com/advantage
76 packages can be updated.
32 updates are security updates.
Last login: Wed May 19 07:07:15 2021
dji@manifold2:~$ roslaunch dji_osdk_ros dji_sdk_node.launch
... logging to /home/dji/.ros/log/56760a2a-b872-11eb-a913-60601fcd6057/roslaunch-manifold2-3800.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:40060/
SUMMARY
========
PARAMETERS
* /dji_sdk/acm_name: /dev/ttyACM0
* /dji_sdk/align_time: False
* /dji_sdk/app_id: 12345
* /dji_sdk/app_version: 1
* /dji_sdk/baud_rate: 921600
* /dji_sdk/dxc: False
* /dji_sdk/enc_key: abc123
* /dji_sdk/serial_name: /dev/ttyUSB0
* /dji_sdk/use_broadcast: False
* /rosdistro: kinetic
* /rosversion: 1.12.17
NODES
/
dji_sdk (dji_osdk_ros/dji_sdk_node)
auto-starting new master
process[master]: started with pid [3810]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 56760a2a-b872-11eb-a913-60601fcd6057
process[rosout-1]: started with pid [3823]
started core service [/rosout]
process[dji_sdk-2]: started with pid [3827]
[ INFO] [1621408680.849454793]: Advanced Sensing is Enabled on M210.
Read App ID
User Configuration read successfully.
[2206010.276]ERRORLOG/1 @ initVehicle, L222: Failed to initialize ACM Linker channel!
[2206010.299]STATUS/1 @ getDroneVersion, L1702: ret = 0
[2206010.300]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1DADG6400100P1
[2206010.300]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.3.44
[2206010.302]STATUS/1 @ functionalSetUp, L279: Shake hand with drone successfully by getting drone version.
[2206010.302]STATUS/1 @ legacyX5SEnableTask, L56: Legacy X5S Enable task created.
[2206011.302]STATUS/1 @ sendHeartbeatToFCTask, L1576: OSDK send heart beat to fc task created.
[2206011.502]STATUS/1 @ Control, L40: The control class is going to be deprecated.It will be better to use the FlightController clas
[2206011.503]STATUS/1 @ FileMgrImpl, L253: register download file callback handler successfully.
[2206011.504]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206011.504]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206011.504]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206011.504]STATUS/1 @ initDJIHms, L900: DJI HMS is not supported on this platform!
[2206011.505]STATUS/1 @ init, L247: USB is not plugged or initialized successfully. Advacned-Sensing will not run.
[2206011.505]STATUS/1 @ activate, L1329: version 0x304032C
[2206011.516]STATUS/1 @ activate, L1367: Activation successful
[ INFO] [1621408683.836883524]: Use data subscription to get telemetry data!
[ INFO] [1621408683.837226392]: align_time_with_FC set to false. We will use ros time to time stamp messages!
[2206013.296]STATUS/1 @ verify, L244: Verify subscription successful.
[2206013.315]STATUS/1 @ startPackage, L345: Start package 2 result: 0.
[2206013.315]STATUS/1 @ startPackage, L347: Package 2 info: freq=100, nTopics=3.
[2206013.359]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[2206013.359]STATUS/1 @ startPackage, L347: Package 1 info: freq=50, nTopics=13.
[2206013.432]STATUS/1 @ startPackage, L345: Start package 0 result: 0.
[2206013.432]STATUS/1 @ startPackage, L347: Package 0 info: freq=5, nTopics=1.
[2206013.470]STATUS/1 @ removePackage, L457: Remove package 0 successful.
[2206013.549]STATUS/1 @ startPackage, L345: Start package 0 result: 0.
[2206013.549]STATUS/1 @ startPackage, L347: Package 0 info: freq=5, nTopics=12.
[2206013.553]STATUS/1 @ startPackage, L345: Start package 3 result: 0.
[2206013.553]STATUS/1 @ startPackage, L347: Package 3 info: freq=400, nTopics=1.
^C[dji_sdk-2] killing on exit
[2206054.500]STATUS/1 @ removePackage, L457: Remove package 0 successful.
[2206054.679]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[2206054.774]STATUS/1 @ removePackage, L457: Remove package 2 successful.
[2206054.844]STATUS/1 @ removePackage, L457: Remove package 3 successful.
[2206054.850]STATUS/1 @ verify, L244: Verify subscription successful.
[2206054.872]STATUS/1 @ reset, L551: Reset Subscription Successful.
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ clear
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/7d48cc82-b872-11eb-9289-60601fcd6057/roslaunch-manifold2-4316.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:40614/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [4326]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 7d48cc82-b872-11eb-9289-60601fcd6057
process[rosout-1]: started with pid [4339]
started core service [/rosout]
process[vehicle_node-2]: started with pid [4348]
ERROR: In /build/vtk6-rCT4UR/vtk6-6.2.0+dfsg1/Rendering/OpenGL/vtkXOpenGLRenderWindow.cxx, line 1466
vtkXOpenGLRenderWindow (0xa06290): bad X server connection. DISPLAY=localhost:10.0. Aborting.
[vehicle_node-2] process has died [pid 4348, exit code -6, cmd /home/dji/catkin_ws/devel/lib/dji_osdk_ros/dji_vehicle_node __name:=vehicle_node __log:=/home/dji/.ros/log/7d48cc82-b872-11eb-9289-60601fcd6057/vehicle_node-2.log].
log file: /home/dji/.ros/log/7d48cc82-b872-11eb-9289-60601fcd6057/vehicle_node-2*.log
^C[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ clear
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/8ddb59b6-b872-11eb-80a0-60601fcd6057/roslaunch-manifold2-4396.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:41664/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [4406]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 8ddb59b6-b872-11eb-80a0-60601fcd6057
process[rosout-1]: started with pid [4419]
started core service [/rosout]
process[vehicle_node-2]: started with pid [4434]
ERROR: In /build/vtk6-rCT4UR/vtk6-6.2.0+dfsg1/Rendering/OpenGL/vtkXOpenGLRenderWindow.cxx, line 1466
vtkXOpenGLRenderWindow (0xa06290): bad X server connection. DISPLAY=localhost:10.0. Aborting.
[vehicle_node-2] process has died [pid 4434, exit code -6, cmd /home/dji/catkin_ws/devel/lib/dji_osdk_ros/dji_vehicle_node __name:=vehicle_node __log:=/home/dji/.ros/log/8ddb59b6-b872-11eb-80a0-60601fcd6057/vehicle_node-2.log].
log file: /home/dji/.ros/log/8ddb59b6-b872-11eb-80a0-60601fcd6057/vehicle_node-2*.log
^C[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/981917ba-b872-11eb-9733-60601fcd6057/roslaunch-manifold2-4779.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:43338/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [4789]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 981917ba-b872-11eb-9733-60601fcd6057
process[rosout-1]: started with pid [4802]
started core service [/rosout]
process[vehicle_node-2]: started with pid [4819]
ERROR: In /build/vtk6-rCT4UR/vtk6-6.2.0+dfsg1/Rendering/OpenGL/vtkXOpenGLRenderWindow.cxx, line 1466
vtkXOpenGLRenderWindow (0xa06290): bad X server connection. DISPLAY=localhost:10.0. Aborting.
[vehicle_node-2] process has died [pid 4819, exit code -6, cmd /home/dji/catkin_ws/devel/lib/dji_osdk_ros/dji_vehicle_node __name:=vehicle_node __log:=/home/dji/.ros/log/981917ba-b872-11eb-9733-60601fcd6057/vehicle_node-2.log].
log file: /home/dji/.ros/log/981917ba-b872-11eb-9733-60601fcd6057/vehicle_node-2*.log
^C[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/b3996f08-b872-11eb-82ac-60601fcd6057/roslaunch-manifold2-4845.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:44049/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [4855]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to b3996f08-b872-11eb-82ac-60601fcd6057
process[rosout-1]: started with pid [4868]
started core service [/rosout]
process[vehicle_node-2]: started with pid [4878]
ERROR: In /build/vtk6-rCT4UR/vtk6-6.2.0+dfsg1/Rendering/OpenGL/vtkXOpenGLRenderWindow.cxx, line 1466
vtkXOpenGLRenderWindow (0xa06290): bad X server connection. DISPLAY=localhost:10.0. Aborting.
[vehicle_node-2] process has died [pid 4878, exit code -6, cmd /home/dji/catkin_ws/devel/lib/dji_osdk_ros/dji_vehicle_node __name:=vehicle_node __log:=/home/dji/.ros/log/b3996f08-b872-11eb-82ac-60601fcd6057/vehicle_node-2.log].
log file: /home/dji/.ros/log/b3996f08-b872-11eb-82ac-60601fcd6057/vehicle_node-2*.log
^C[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/c03c7390-b872-11eb-ae83-60601fcd6057/roslaunch-manifold2-4906.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:45620/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [4916]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to c03c7390-b872-11eb-ae83-60601fcd6057
process[rosout-1]: started with pid [4929]
started core service [/rosout]
process[vehicle_node-2]: started with pid [4946]
EnableAd: 1
[2206189.868]STATUS/1 @ getDroneVersion, L1702: ret = 0
[2206189.868]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1DADG6400100P1
[2206189.868]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.3.44
[2206189.868]STATUS/1 @ functionalSetUp, L279: Shake hand with drone successfully by getting drone version.
[2206189.869]STATUS/1 @ legacyX5SEnableTask, L56: Legacy X5S Enable task created.
[2206190.869]STATUS/1 @ sendHeartbeatToFCTask, L1576: OSDK send heart beat to fc task created.
[2206191.069]STATUS/1 @ Control, L40: The control class is going to be deprecated.It will be better to use the FlightController class instead!
[2206191.070]STATUS/1 @ FileMgrImpl, L253: register download file callback handler successfully.
[2206192.339]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206192.340]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206192.340]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206192.341]STATUS/1 @ initDJIHms, L900: DJI HMS is not supported on this platform!
[2206192.359]STATUS/1 @ getDroneVersion, L1702: ret = 0
[2206192.359]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1DADG6400100P1
[2206192.360]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.3.44
[2206192.360]STATUS/1 @ AdvancedSensing, L145: Advanced Sensing init for the M210 drone
[2206192.360]STATUS/1 @ init, L49: Looking for USB device...
[2206192.376]STATUS/1 @ init, L65: Found 3 USB devices, identifying DJI device...
[2206192.376]STATUS/1 @ init, L83: Found a DJI device...
[2206192.376]STATUS/1 @ init, L96: Attempting to open DJI USB device...
[2206192.376]STATUS/1 @ init, L134: ...DJI USB device started successfully.
[2206192.379]STATUS/1 @ LiveViewImpl, L89: Finding if liveview stream is available now.
[2206192.880]STATUS/1 @ init, L254: Start advanced sensing initalization
[2206192.880]STATUS/1 @ activate, L1329: version 0x304032C
[2206192.880]STATUS/1 @ adv_pthread, L46: [2206192.880]STATUS/1 @ adv_pthread, L48: adv pthread running !!!!!!!!!!!!!!!!!!!!!!!
[2206192.896]STATUS/1 @ activate, L1367: Activation successful
[2206192.962]ERRORLOG/1 @ processAdvancedSensingImgs, L850: No callback registered for 240p stereo images.
This usually happens when user subscribed to images and restart the program without unsubscribing them.
Vehicle unsubscribed 240p stereo images automatically.
[ INFO] [1621408864.489493751]: VehicleNode Start
[ INFO] [1621408864.489906773]: Topic startup!
[ INFO] [1621408864.765828764]: Services startup!
[ INFO] [1621408864.887883805]: Use data subscription to get telemetry data!
[ INFO] [1621408864.888079989]: align_time_with_FC set to false. We will use ros time to time stamp messages!
[2206194.335]STATUS/1 @ verify, L244: Verify subscription successful.
[2206194.352]STATUS/1 @ startPackage, L345: Start package 3 result: 0.
[2206194.352]STATUS/1 @ startPackage, L347: Package 3 info: freq=100, nTopics=3.
[2206194.374]STATUS/1 @ startPackage, L345: Start package 2 result: 0.
[2206194.374]STATUS/1 @ startPackage, L347: Package 2 info: freq=50, nTopics=14.
[2206194.408]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[2206194.408]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=1.
[2206194.588]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[2206194.785]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[2206194.785]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=12.
[2206194.967]STATUS/1 @ startPackage, L345: Start package 4 result: 0.
[2206194.967]STATUS/1 @ startPackage, L347: Package 4 info: freq=400, nTopics=1.
^C[vehicle_node-2] killing on exit
[2206197.092]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[2206197.270]STATUS/1 @ removePackage, L457: Remove package 2 successful.
[2206197.447]STATUS/1 @ removePackage, L457: Remove package 3 successful.
[2206197.514]STATUS/1 @ removePackage, L457: Remove package 4 successful.
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
dji@manifold2:~$ clear
dji@manifold2:~$ roslaunch dji_osdk_ros dji_vehicle_node.launch
... logging to /home/dji/.ros/log/cadef20a-b872-11eb-b291-60601fcd6057/roslaunch-manifold2-5228.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://manifold2:34858/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1069909
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 230400
* /vehicle_node/enc_key: bf417611d630f3107...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: False
NODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)
auto-starting new master
process[master]: started with pid [5238]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to cadef20a-b872-11eb-b291-60601fcd6057
process[rosout-1]: started with pid [5251]
started core service [/rosout]
process[vehicle_node-2]: started with pid [5268]
EnableAd: 1
[2206207.298]STATUS/1 @ getDroneVersion, L1702: ret = 0
[2206207.298]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1DADG6400100P1
[2206207.298]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.3.44
[2206207.299]STATUS/1 @ functionalSetUp, L279: Shake hand with drone successfully by getting drone version.
[2206207.299]STATUS/1 @ legacyX5SEnableTask, L56: Legacy X5S Enable task created.
[2206208.299]STATUS/1 @ sendHeartbeatToFCTask, L1576: OSDK send heart beat to fc task created.
[2206208.499]STATUS/1 @ Control, L40: The control class is going to be deprecated.It will be better to use the FlightController class instead!
[2206208.500]STATUS/1 @ FileMgrImpl, L253: register download file callback handler successfully.
[2206209.765]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206209.765]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206209.765]STATUS/1 @ PSDKModule, L98: MOP only support M300, so mop client will not be initialized here.
[2206209.766]STATUS/1 @ initDJIHms, L900: DJI HMS is not supported on this platform!
[2206209.775]STATUS/1 @ getDroneVersion, L1702: ret = 0
[2206209.775]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1DADG6400100P1
[2206209.775]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.3.44
[2206209.775]STATUS/1 @ AdvancedSensing, L145: Advanced Sensing init for the M210 drone
[2206209.775]STATUS/1 @ init, L49: Looking for USB device...
[2206209.791]STATUS/1 @ init, L65: Found 3 USB devices, identifying DJI device...
[2206209.791]STATUS/1 @ init, L83: Found a DJI device...
[2206209.791]STATUS/1 @ init, L96: Attempting to open DJI USB device...
[2206209.791]STATUS/1 @ init, L134: ...DJI USB device started successfully.
[2206209.793]STATUS/1 @ LiveViewImpl, L89: Finding if liveview stream is available now.
[2206210.294]STATUS/1 @ init, L254: Start advanced sensing initalization
[2206210.294]STATUS/1 @ activate, L1329: version 0x304032C
[2206210.294]STATUS/1 @ adv_pthread, L46: [2206210.294]STATUS/1 @ adv_pthread, L48: adv pthread running !!!!!!!!!!!!!!!!!!!!!!!
[2206210.315]STATUS/1 @ activate, L1367: Activation successful
[ INFO] [1621408881.908995171]: VehicleNode Start
[ INFO] [1621408881.909468470]: Topic startup!
[ INFO] [1621408882.166387367]: Services startup!
[ INFO] [1621408882.277773976]: Use data subscription to get telemetry data!
[ INFO] [1621408882.277964598]: align_time_with_FC set to false. We will use ros time to time stamp messages!
[2206211.715]STATUS/1 @ verify, L244: Verify subscription successful.
[2206211.732]STATUS/1 @ startPackage, L345: Start package 3 result: 0.
[2206211.732]STATUS/1 @ startPackage, L347: Package 3 info: freq=100, nTopics=3.
[2206211.752]STATUS/1 @ startPackage, L345: Start package 2 result: 0.
[2206211.753]STATUS/1 @ startPackage, L347: Package 2 info: freq=50, nTopics=14.
[2206211.787]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[2206211.787]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=1.
[2206211.966]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[2206212.165]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[2206212.165]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=12.
[2206212.346]STATUS/1 @ startPackage, L345: Start package 4 result: 0.
[2206212.346]STATUS/1 @ startPackage, L347: Package 4 info: freq=400, nTopics=1.
打开模拟器进行仿真
运行命令
rosrun dji_osdk_ros flight_control_node
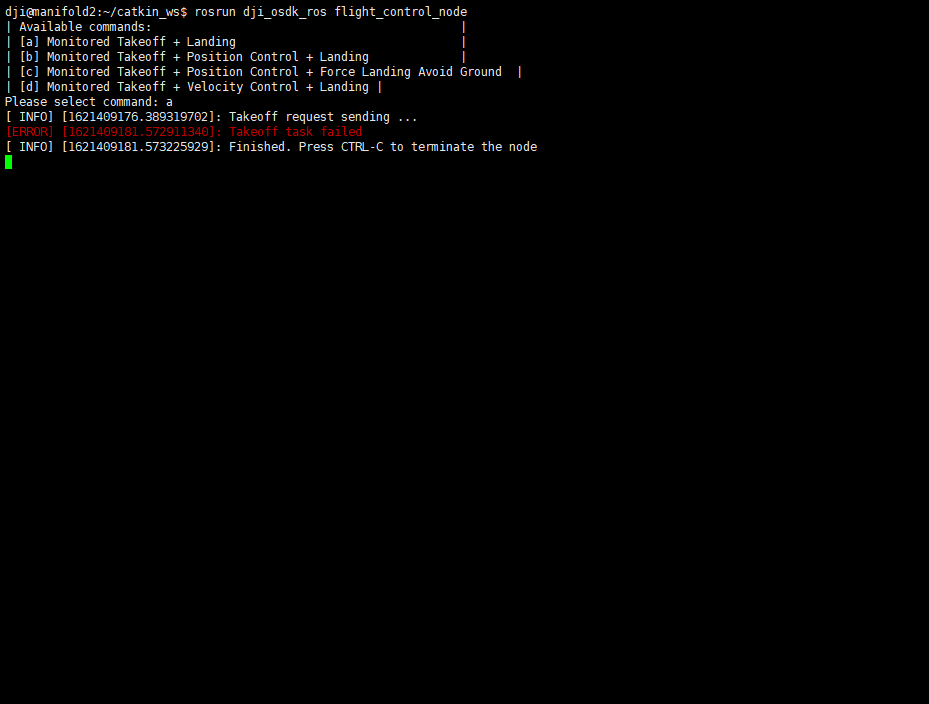
在主节点中得到结果

模拟器中结果 :电机在转!!!,且遥控器在嘀嘀嘀一直响
实验多次,均无法正常起飞。
请先登录再写评论。
评论
4 条评论