时间同步功能,已实现PPS功能,DjiTimeSync_TransferToAircraftTime能同步到飞机的时...
已完成时间同步功能,已实现PPS功能,DjiTimeSync_TransferToAircraftTime能同步到飞机的时间了,但是时间不对,室内打印出来的时间是1979.12.24 20:58:00,室外打印出来的2022.07.16 15:30:20,请问一下是什么问题
-

时间同步的是GPS时间,需要断开模拟器,在GPS信号良好的环境中进行时间获取或转换。本地时间需要UTC时间加时区。  -
这个时间看起来不是实际环境中的时间,断开模拟器,重启一下飞机并连接遥控器查看确认GPS信号状态。如果还是不对,麻烦导出飞机log提交到dev@dji.com邮箱,我们查看log记录时间(备注一下测试时的北京时间)。 -
Linux平台这个回调要修改一下,不修改会出现溢出导致本地时间无效报错。可以改成从0按ms计数,也可以启动时获取一下本地时间,然后获取时间先减去启动的时间再通过这个回调赋值传给PSDK lib。 5.16 时间同步(time_sync) https://sdk-forum.dji.net/hc/zh-cn/articles/7025264281241  -
飞机固件版本和PSDK版本分别是多少?我这边用最新的版本测试时间是正常的(北京时间+8)。  -
PSDK用最新的master分支试试,我这边用的是最新的master版本(1509)。TOPIC获取飞机时间是对的,飞机端的时间应该没有问题,如果PSDK版本也没有问题,可能就要查代码了。将转换的时间和PPS脉冲的时间打印出来比对一下。  -

/**
********************************************************************
* @file test_time_sync.c
* @brief
*
* @copyright (c) 2021 DJI. All rights reserved.
*
* All information contained herein is, and remains, the property of DJI.
* The intellectual and technical concepts contained herein are proprietary
* to DJI and may be covered by U.S. and foreign patents, patents in process,
* and protected by trade secret or copyright law. Dissemination of this
* information, including but not limited to data and other proprietary
* material(s) incorporated within the information, in any form, is strictly
* prohibited without the express written consent of DJI.
*
* If you receive this source code without DJI’s authorization, you may not
* further disseminate the information, and you must immediately remove the
* source code and notify DJI of its removal. DJI reserves the right to pursue
* legal actions against you for any loss(es) or damage(s) caused by your
* failure to do so.
*
*********************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include <fc_subscription/test_fc_subscription.h>
#include "test_time_sync.h"
#include "dji_time_sync.h"
#include "dji_logger.h"
#include "utils/util_misc.h"
#include "dji_platform.h"
#include <unistd.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/stat.h>
#include <fcntl.h>
#include "czi_time_format.h"
/* Private constants ---------------------------------------------------------*/
#define DJI_TEST_TIME_SYNC_TASK_FREQ (1)
#define DJI_TEST_TIME_SYNC_TASK_STACK_SIZE (2048)
/* Private types -------------------------------------------------------------*/
/* Private functions declaration ---------------------------------------------*/
static void *DjiTest_TimeSyncTask(void *arg);
static void *DjiTest_PpsTask(void *arg);
static T_DjiReturnCode czi_TimeSyncInit();
static T_DjiReturnCode czi_PpsSignalResponseInit(void);
static T_DjiReturnCode czi_GetNewestPpsTriggerLocalTimeUs(uint64_t *localTimeUs);
static uint64_t czi_GetTimeMs();
/* Private variables ---------------------------------------------------------*/
static T_DjiTestTimeSyncHandler s_timeSyncHandler;
static T_DjiTaskHandle s_timeSyncThread;
static T_DjiTaskHandle s_ppsIrqThread;
static uint64_t s_ppsNewestTriggerLocalTimeMs = 0;
static T_DjiMutexHandle s_ppsMutex = {0};
static T_DjiTimeSyncAircraftTime m_aircraftTime = {0};
static T_DjiMutexHandle s_aircraftTimeMutex = {0};
static bool s_tiemSyncInitStatus = false;
static uint32_t startTimeMs = 0;
/* Exported functions definition ---------------------------------------------*/
/**
* @brief Register handler function for initialising PPS pin configure and reporting the latest local time when PPS is
* triggered. This function have to be called before calling DjiTest_TimeSyncInit().
* @param timeSyncHandler: pointer to handler function for time synchronization.
* @return Execution result.
*/
T_DjiReturnCode DjiTest_TimeSyncRegHandler(T_DjiTestTimeSyncHandler *timeSyncHandler)
{
if (timeSyncHandler->PpsSignalResponseInit == NULL) {
USER_LOG_ERROR("reg time sync handler PpsSignalResponseInit error");
return DJI_ERROR_SYSTEM_MODULE_CODE_INVALID_PARAMETER;
}
if (timeSyncHandler->GetNewestPpsTriggerLocalTimeUs == NULL) {
USER_LOG_ERROR("reg time sync handler GetNewestPpsTriggerLocalTimeUs error");
return DJI_ERROR_SYSTEM_MODULE_CODE_INVALID_PARAMETER;
}
memcpy(&s_timeSyncHandler, timeSyncHandler, sizeof(T_DjiTestTimeSyncHandler));
return DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS;
}
T_DjiReturnCode DjiTest_TimeSyncStartService(void)
{
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
if (osalHandler->TaskCreate("user_time_sync_task", DjiTest_TimeSyncTask,
DJI_TEST_TIME_SYNC_TASK_STACK_SIZE, NULL, &s_timeSyncThread) !=
DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("user time sync task create error.");
return DJI_ERROR_SYSTEM_MODULE_CODE_UNKNOWN;
}
return DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS;
}
T_DjiReturnCode DjiTest_TimeSyncGetNewestPpsTriggerLocalTimeUs(uint64_t *localTimeUs)
{
if (s_timeSyncHandler.GetNewestPpsTriggerLocalTimeUs == NULL) {
USER_LOG_ERROR("GetNewestPpsTriggerLocalTimeUs null error.");
return DJI_ERROR_SYSTEM_MODULE_CODE_INVALID_PARAMETER;
}
return s_timeSyncHandler.GetNewestPpsTriggerLocalTimeUs(localTimeUs);
}
T_DjiReturnCode Czi_GetAircraftTime(T_DjiTimeSyncAircraftTime *aircraftTime)
{
if(s_tiemSyncInitStatus == false)
return -1;
T_DjiReturnCode returnCode;
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
returnCode = osalHandler->MutexLock(s_aircraftTimeMutex);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", stat);
return returnCode;
}
*aircraftTime = m_aircraftTime;
returnCode = osalHandler->MutexUnlock(s_aircraftTimeMutex);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", returnCode);
return returnCode;
}
}
/* Private functions definition-----------------------------------------------*/
#ifndef __CC_ARM
#pragma GCC diagnostic push
#pragma GCC diagnostic ignored "-Wmissing-noreturn"
#pragma GCC diagnostic ignored "-Wreturn-type"
#endif
static void *DjiTest_TimeSyncTask(void *arg)
{
T_DjiReturnCode djiStat;
uint64_t currentTimeMs = 0;
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
uint8_t totalSatelliteNumber = 0;
USER_UTIL_UNUSED(arg);
czi_TimeSyncInit();
s_tiemSyncInitStatus = true;
osalHandler->GetTimeMs(&startTimeMs);
if (osalHandler->TaskCreate("user_pps_task", DjiTest_PpsTask,
DJI_TEST_TIME_SYNC_TASK_STACK_SIZE, NULL, &s_ppsIrqThread) !=
DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("user pps task create error.");
return arg;
}
while (1) {
osalHandler->TaskSleepMs(1000 / DJI_TEST_TIME_SYNC_TASK_FREQ);
djiStat = DjiTest_FcSubscriptionGetTotalSatelliteNumber(&totalSatelliteNumber);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("get total satellite number error: 0x%08llX.", djiStat);
continue;
}
// djiStat = osalHandler->GetTimeMs(¤tTimeMs);
// if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
// USER_LOG_ERROR("get current time error: 0x%08llX.", djiStat);
// continue;
// }
// currentTimeMs = czi_GetTimeMs() - 1000*60*60*24;
// USER_LOG_INFO("currentTimeMs:%d ms", currentTimeMs);
djiStat = osalHandler->MutexLock(s_aircraftTimeMutex);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", stat);
continue;
}
osalHandler->GetTimeMs((uint32_t *)(¤tTimeMs));
djiStat = DjiTimeSync_TransferToAircraftTime(currentTimeMs * 1000, &m_aircraftTime);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("transfer to aircraft time error: 0x%08llX.", djiStat);
continue;
}
USER_LOG_INFO("GetTimeMs current aircraft time is %04d.%02d.%02d %02d:%02d %02d.", m_aircraftTime.year, m_aircraftTime.month,
m_aircraftTime.day, m_aircraftTime.hour, m_aircraftTime.minute, m_aircraftTime.second);
djiStat = osalHandler->MutexUnlock(s_aircraftTimeMutex);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", stat);
continue;
}
}
}
static void *DjiTest_PpsTask(void *arg)
{
T_DjiReturnCode stat;
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
int fd_pps = open("/sys/class/pps/pps0/assert", O_RDONLY);
if(fd_pps < 0)
{
USER_LOG_ERROR("fd_pps open error");
return arg;
}
char buf[32];
int nums;
int ret;
int nums_old;
uint32_t timeMs;
USER_UTIL_UNUSED(arg);
while (1) {
osalHandler->TaskSleepMs(1);
memset(buf, 0, 32);
lseek(fd_pps, 0, SEEK_SET);
ret = read(fd_pps, buf, 32);
if(ret)
{
USER_LOG_INFO("pps time : %s", buf);
if(sscanf(buf, "%*[^#]#%d", &nums) == 1)
{
if(nums != nums_old)
{
nums_old = nums;
stat = osalHandler->GetTimeMs(&timeMs);
if(stat == DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS)
{
stat = osalHandler->MutexLock(s_ppsMutex);
if (stat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("lock mutex error: 0x%08llX.", stat);
continue;
}
s_ppsNewestTriggerLocalTimeMs = timeMs;
stat = osalHandler->MutexUnlock(s_ppsMutex);
if (stat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", stat);
continue;
}
}
}
}
}
}
}
static T_DjiReturnCode czi_TimeSyncInit()
{
T_DjiReturnCode djiStat;
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
T_DjiDataTimestamp timestamp = {0};
T_DjiFcSubscriptionGpsDate gpsDate = 0;
T_DjiFcSubscriptionGpsTime gpsTime = 0;
char DateTimeStr[32];
osalHandler->TaskSleepMs(5000);
djiStat = DjiFcSubscription_GetLatestValueOfTopic(DJI_FC_SUBSCRIPTION_TOPIC_GPS_DATE,
(uint8_t *) &gpsDate,
sizeof(T_DjiFcSubscriptionGpsDate),
×tamp);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("get value of topic GPS_DATE error.");
}
djiStat = DjiFcSubscription_GetLatestValueOfTopic(DJI_FC_SUBSCRIPTION_TOPIC_GPS_TIME,
(uint8_t *) &gpsTime,
sizeof(T_DjiFcSubscriptionGpsTime),
×tamp);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("get value of topic GPS_TIME error.");
}
czi_gpstime_UtcToBeijing(&gpsDate, &gpsTime);
snprintf(DateTimeStr, 64, "sudo date -s '%04d%02d%02d %02d:%02d:%02d'", gpsDate/10000, gpsDate/100%100, gpsDate%100,
gpsTime/10000, gpsTime/100%100, gpsTime%100);
USER_LOG_INFO("%s", DateTimeStr);
system(DateTimeStr);
djiStat = DjiTimeSync_Init();
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("time synchronization module init error.");
return djiStat;
}
s_timeSyncHandler.PpsSignalResponseInit = czi_PpsSignalResponseInit;
s_timeSyncHandler.GetNewestPpsTriggerLocalTimeUs = czi_GetNewestPpsTriggerLocalTimeUs;
if (s_timeSyncHandler.PpsSignalResponseInit == NULL) {
USER_LOG_ERROR("time sync handler PpsSignalResponseInit interface is NULL error");
return DJI_ERROR_SYSTEM_MODULE_CODE_UNKNOWN;
}
if (s_timeSyncHandler.GetNewestPpsTriggerLocalTimeUs == NULL) {
USER_LOG_ERROR("time sync handler GetNewestPpsTriggerLocalTimeUs interface is NULL error");
return DJI_ERROR_SYSTEM_MODULE_CODE_UNKNOWN;
}
djiStat = osalHandler->MutexCreate(&s_ppsMutex);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("create mutex used to lock pps arguments error: 0x%08llX", djiStat);
return djiStat;
}
djiStat = osalHandler->MutexCreate(&s_aircraftTimeMutex);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("create mutex used to lock aircraftTimeMutex arguments error: 0x%08llX", djiStat);
return djiStat;
}
// users must register getNewestPpsTriggerTime callback function
djiStat = DjiTimeSync_RegGetNewestPpsTriggerTimeCallback(s_timeSyncHandler.GetNewestPpsTriggerLocalTimeUs);
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("register GetNewestPpsTriggerLocalTimeUsCallback error.");
return djiStat;
}
djiStat = s_timeSyncHandler.PpsSignalResponseInit();
if (djiStat != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("pps signal response init error");
return djiStat;
}
}
static T_DjiReturnCode czi_PpsSignalResponseInit(void)
{
return DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS;
}
static T_DjiReturnCode czi_GetNewestPpsTriggerLocalTimeUs(uint64_t *localTimeUs)
{
T_DjiReturnCode returnCode;
T_DjiOsalHandler *osalHandler = DjiPlatform_GetOsalHandler();
if (localTimeUs == NULL) {
USER_LOG_ERROR("input pointer is null.");
return DJI_ERROR_SYSTEM_MODULE_CODE_INVALID_PARAMETER;
}
returnCode = osalHandler->MutexLock(s_ppsMutex);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("lock mutex error: 0x%08llX.", returnCode);
return returnCode;
}
if (s_ppsNewestTriggerLocalTimeMs == 0) {
USER_LOG_WARN("pps have not been triggered.");
return DJI_ERROR_SYSTEM_MODULE_CODE_BUSY;
}
*localTimeUs = (uint64_t) (s_ppsNewestTriggerLocalTimeMs * 1000);
returnCode = osalHandler->MutexUnlock(s_ppsMutex);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
USER_LOG_ERROR("unlock mutex error: 0x%08llX.", returnCode);
return returnCode;
}
return DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS;
}
static uint64_t czi_GetTimeMs()
{
struct timeval tv;
long long t = 0;
gettimeofday(&tv, NULL);
t = (tv.tv_sec*1000 + tv.tv_usec/1000);
return t;
}
#ifndef __CC_ARM
#pragma GCC diagnostic pop
#endif
/****************** (C) COPYRIGHT DJI Innovations *****END OF FILE****/ -
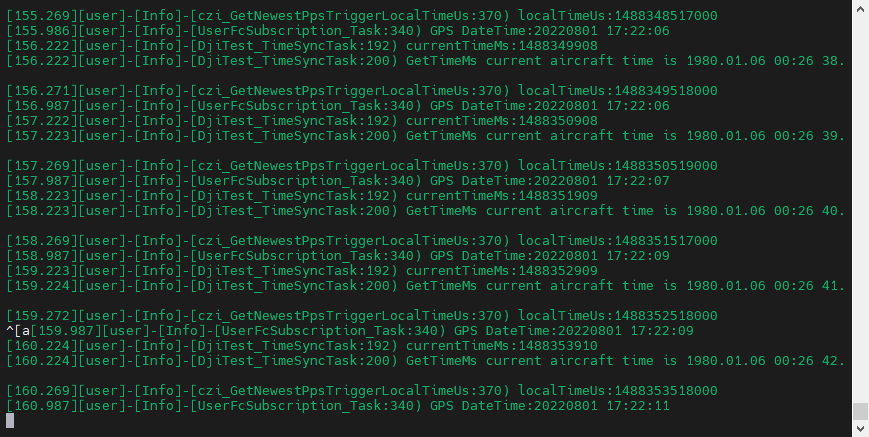
可以在下面两个地方加一下debug log,确认一下PPS时间以及转换飞机时间的currenttime  和  -
我这边编个aarc64的测试程序您运行一下获取飞机的时间试试。可能要提供一下您的APPINFO,麻烦您通过个人邮箱发个邮件到dev@dji.com,。 -
cz@ubuntu:~$ sudo ./dji_sdk_demo_linux
[0.001][core]-[Info]-[DjiCore_Init:92) Payload SDK Version : V3.1.0-beta.0-build.999
[0.284][adapter]-[Info]-[DjiAccessAdapter_Init:154) Identify aircraft series is Matrice 300 Series
[0.284][adapter]-[Info]-[DjiAccessAdapter_Init:171) Identify mount position type is Payload Port Type
[0.298][adapter]-[Info]-[DjiPayloadNegotiate_Start:199) Waiting payload negotiate finished.
l4tbr0: ERROR while getting interface flags: No such device
[1.316][user]-[Error]-[HalNetWork_Init:59) Can't open the network.Probably the program not execute with root permission.Please use the root permission to execute the program.
[1.316][adapter]-[Error]-[DjiPayloadNegotiate_Start:238) Payload negetiate network config error:0x000000EC
[1.316][adapter]-[Error]-[DjiAccessAdapter_Init:273) Payload negotiate error, returnCode = 236
[1.316][adapter]-[Error]-[DjiAccessAdapter_Init:279) Payload negotiate error, returnCode = 236
[1.316][core]-[Error]-[DjiCore_Init:103) Access adapter init error, stat:236
[1.316][user]-[Error]-[main:201) Core init error



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
请先登录再写评论。
评论
27 条评论