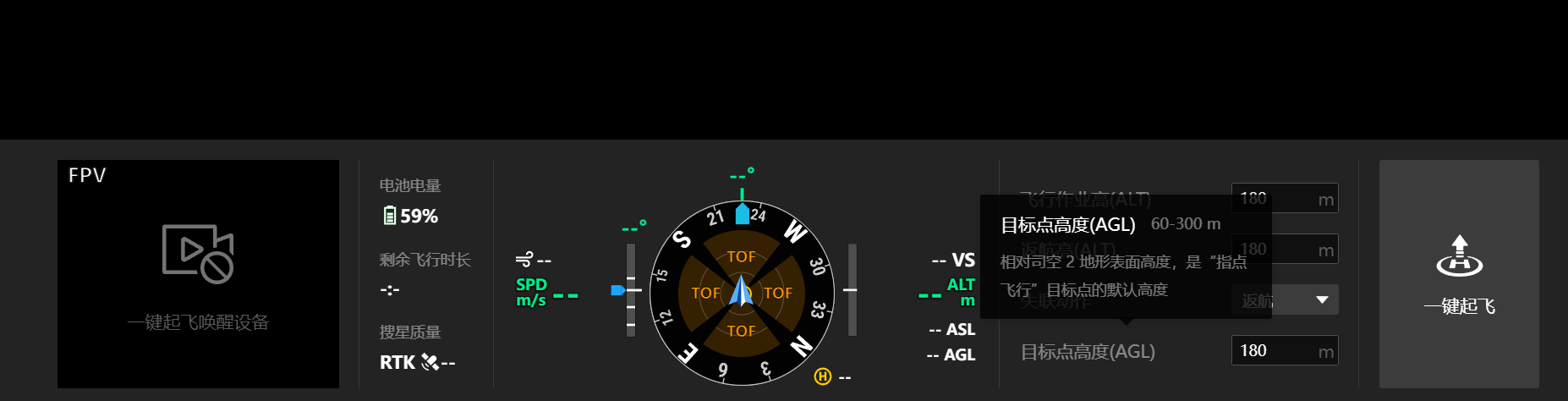
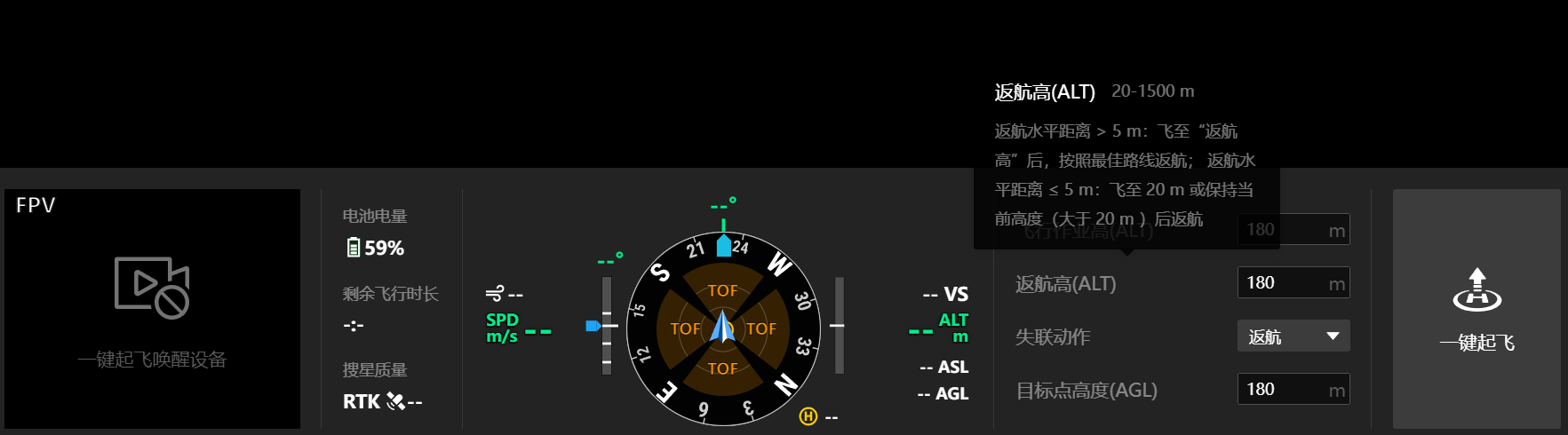
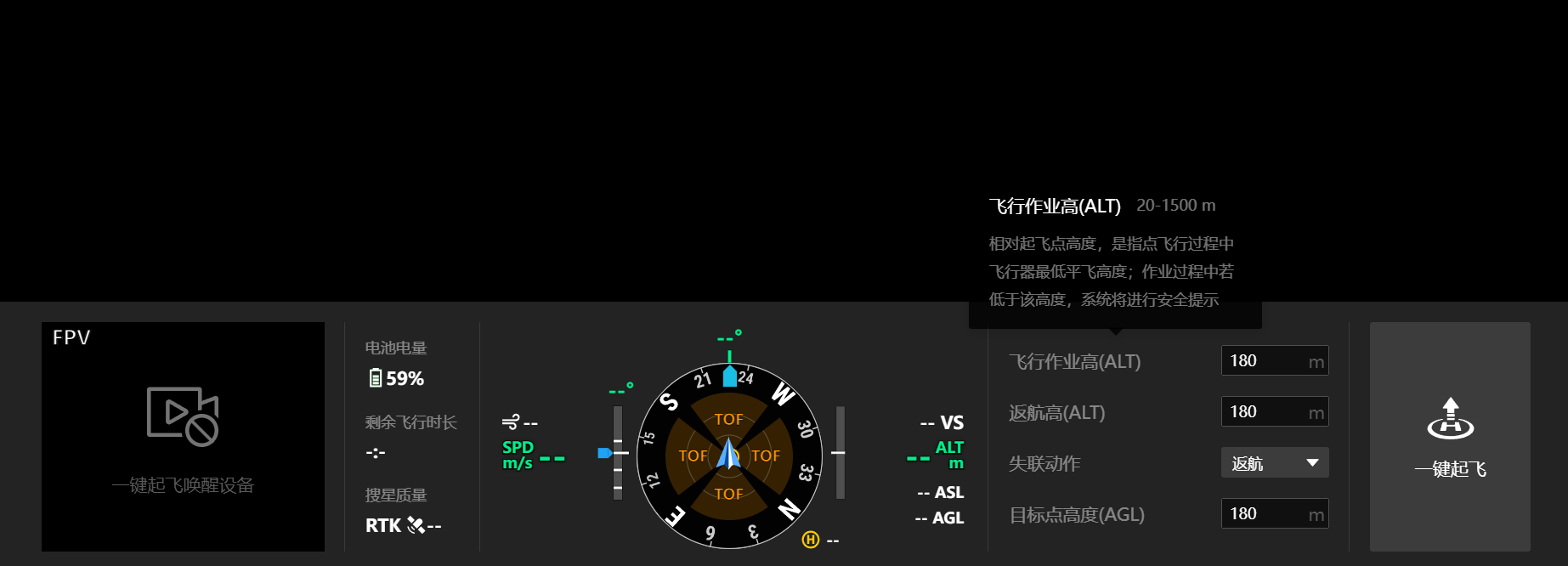
如何在飞行过程设置返航高,飞行作业高,目标点高度
已完成
如题,参考司空2的虚拟座舱,使用上云API要使用哪个方法设置哪3个属性?一代和二代机场有没有区分限制?
-

尊敬的开发者, 您好,感谢您联系DJI 大疆创新。 可以参考下一键起飞:https://developer.dji.com/doc/cloud-api-tutorial/cn/api-reference/dock-to-cloud/mqtt/dock/dock2/drc.html#%E4%B8%80%E9%94%AE%E8%B5%B7%E9%A3%9E 一代二代机场没有区分限制 希望我们的解决方案能够帮到您,感谢您的邮件,祝您生活愉快! Best Regards, DJI 大疆创新SDK技术支持
 我意思是使用上云API实现司空2的飞行设置功能来动态设置返航高,作业高,要用哪个方法设置
我意思是使用上云API实现司空2的飞行设置功能来动态设置返航高,作业高,要用哪个方法设置请先登录再写评论。
评论
6 条评论