航点上相机水平方向角度怎么设置
已完成
机库Dock 2,飞机M3TD
大疆上云API航线介绍上,wpml:gimbalPitchAngle:航点云台俯仰角,可设置垂直方向角度
水平方向上相机角度怎么控制呢?
另外,几个航拍模板元素里面有 wpml:direction:航线方向。航线飞行时,按航线飞行,这个航线方向是什么意思呢
-

尊敬的开发者, 您好,感谢您联系DJI 大疆创新。 在航点任务中,云台的俯仰、横滚和偏航角度都可以进行设置。具体参数如下: gimbal_pitch:云台俯仰轴角度,范围为-180到180度。 gimbal_roll:云台横滚轴角度,范围为-180到180度。 gimbal_yaw:云台朝向角度,范围为-180到180度,表示与真北的夹角。 要控制水平方向上的相机角度,可以使用 gimbal_yaw 参数来设置云台的偏航角度。 wpml:direction表示航线方向。航线方向指的是飞行器按照预设的航点依次飞行的路径和方向。飞行器会根据预设的航点进行飞行,每个航点的定义包括经纬度、高度以及一些高级的航点动作设置,如悬停、返航、降落、拍照、录像和云台角度调整等。 希望我们的解决方案能够帮到您,感谢您的邮件,祝您生活愉快! Best Regards, DJI 大疆创新SDK技术支持 -
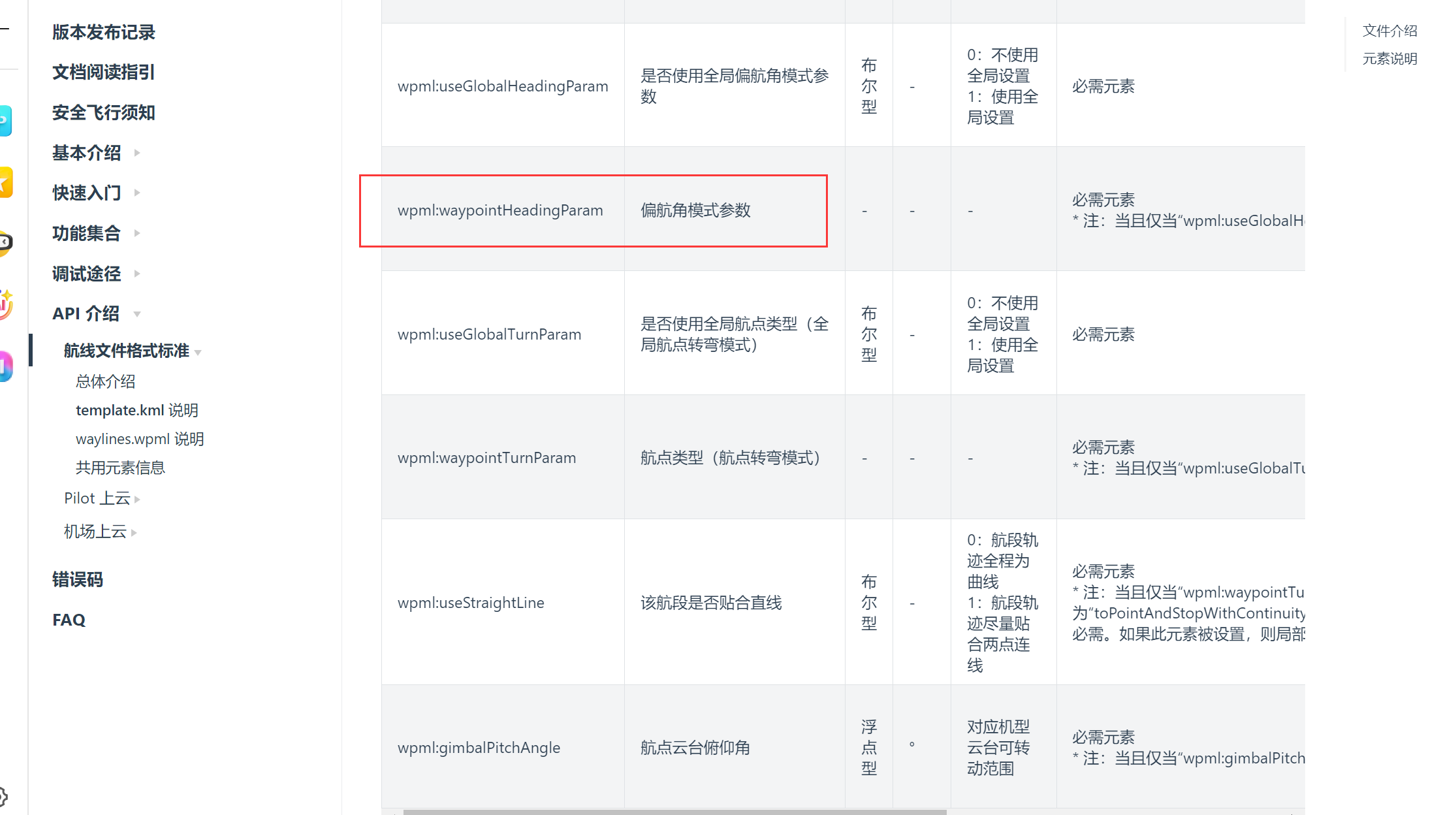
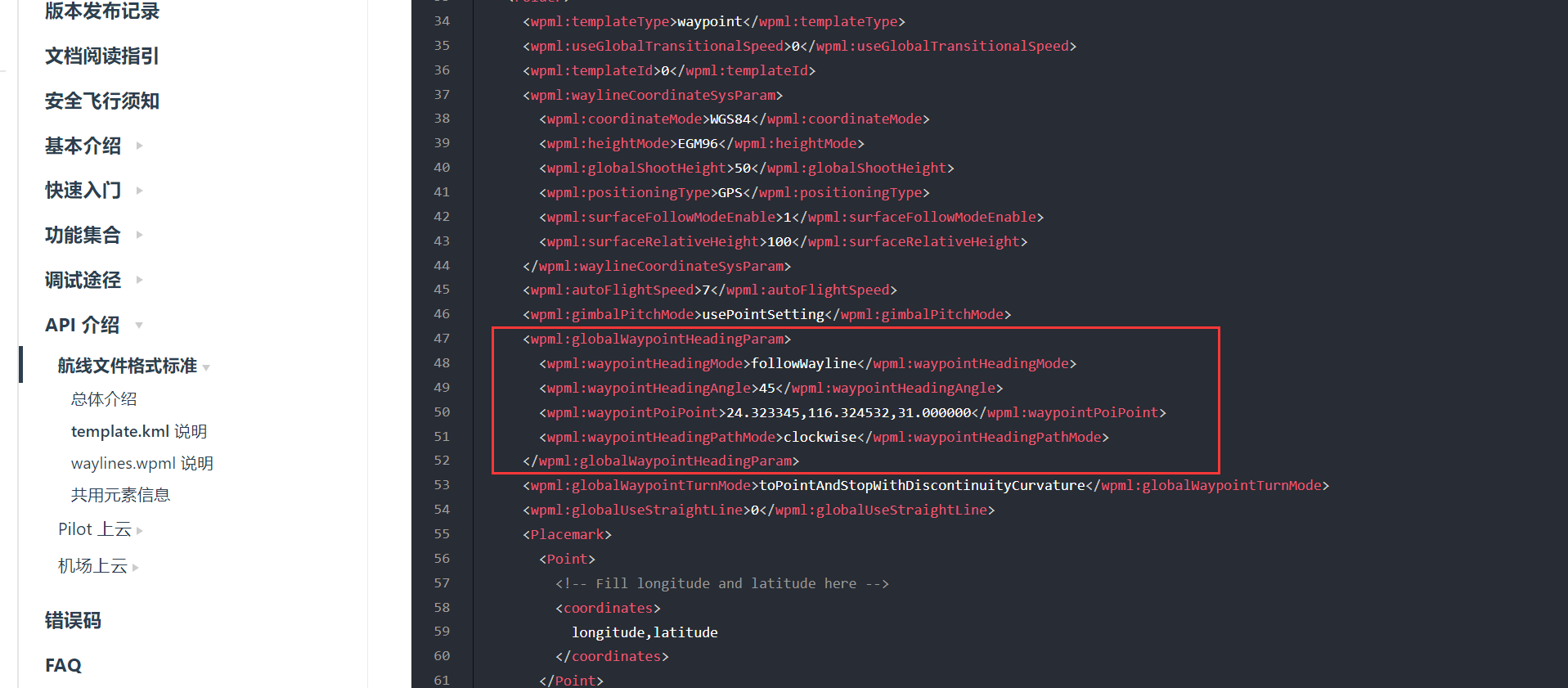
亲爱的客户, 您好,感谢您联系DJI 大疆创新。 可以查看waypointHeadingAngle,可以为每个航点配置相机在水平方向上的拍摄角度。 如图这个是设置偏航角模式的标签。 globalWaypointHeadingParam 用于定义航点任务中飞行器的全局航向参数,确保飞行器在执行任务时按照预定的航向进行飞行和调整。 建议先熟悉航线文件的格式,然后通过Pilot2 生成。在Pilot2 的航线库中,创建一个航线后,Pilot2 会在本地保存该航线的kmz文件, 或者通过司空2 生成。在司空2系统中规划一个航线,司空2 会生成该文件。 先查看文件内标签跟您所设置的航点动作的关联,如果使用手动手写可能格式会出现问题。 希望我们的解决方案可以帮助你。 亲切的问候, DJI 开发人员支持团队 -
航线文件我已经自己生成,然后飞行都正常。现在就是这四个参数<wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode>
<wpml:waypointHeadingAngle>45</wpml:waypointHeadingAngle>
<wpml:waypointPoiPoint>24.323345,116.324532,31.000000</wpml:waypointPoiPoint>
<wpml:waypointHeadingPathMode>clockwise</wpml:waypointHeadingPathMode>如果不采用全局定义,就可以直接航点标签里面定义是吧?文档中没有介绍参数的含义,可以帮介绍一下
-
尊敬的开发者, 您好,感谢您联系DJI 大疆创新。 是的,如果不采用全局定义,可以直接在航点标签里面定义这些参数。 followWayline 设置航点任务中飞机的机头朝向模式。followWayline:表示飞机的机头将始终朝向飞行路径的方向。 45 设置飞机在航点处的机头朝向角度。45表示飞机的机头将朝向45度方向(相对于正北方向) 24.323345,116.324532,31.000000 设置兴趣点(POI)的坐标,飞机的机头将朝向该兴趣点。24.323345,116.324532,31.000000:表示兴趣点的经度、纬度和高度。 clockwise 设置飞机在航点处转向的方向。clockwise表示飞机将顺时针转向。 希望我们的解决方案能够帮到您,感谢您的邮件,祝您生活愉快! Best Regards, DJI 大疆创新SDK技术支持 -
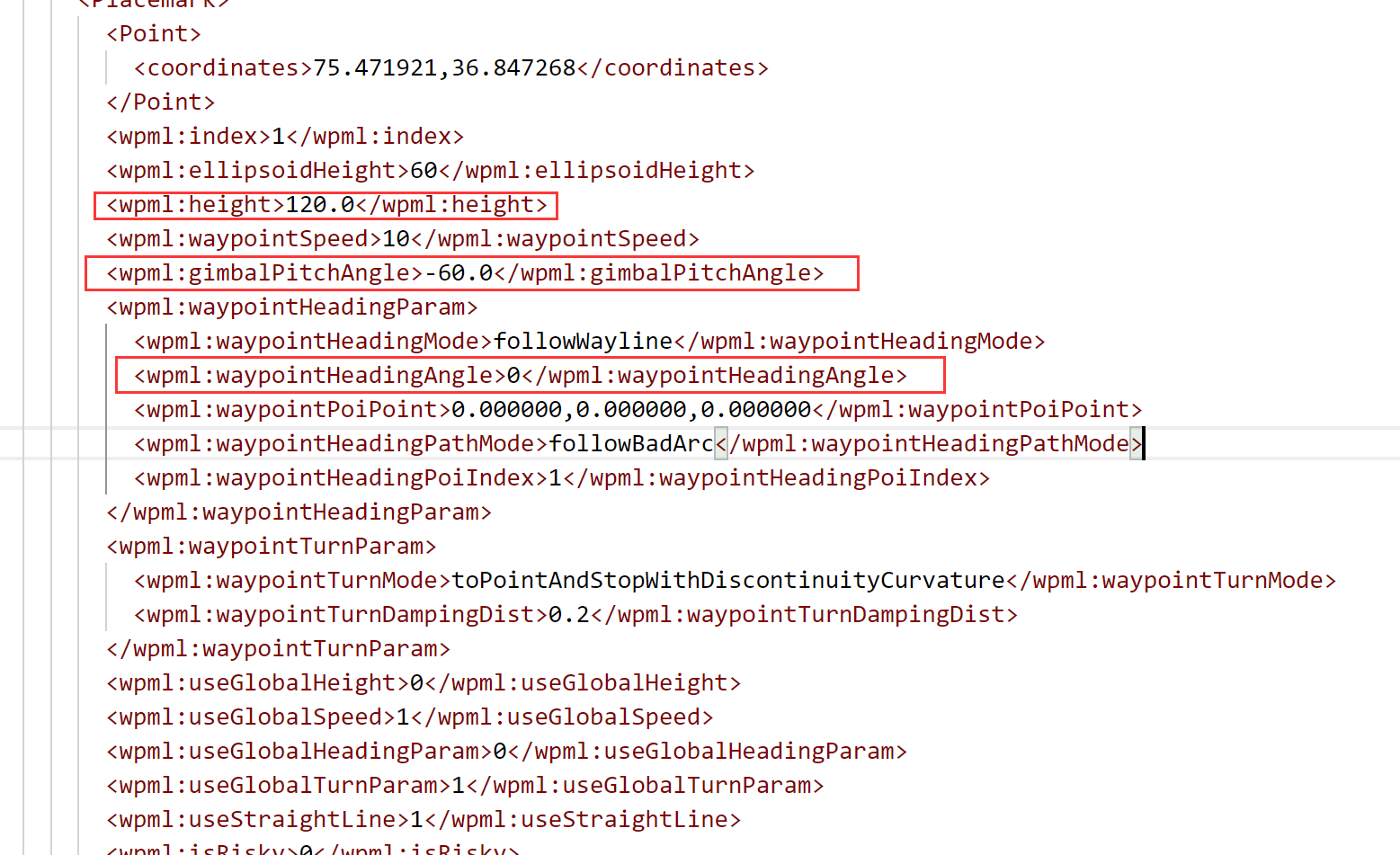
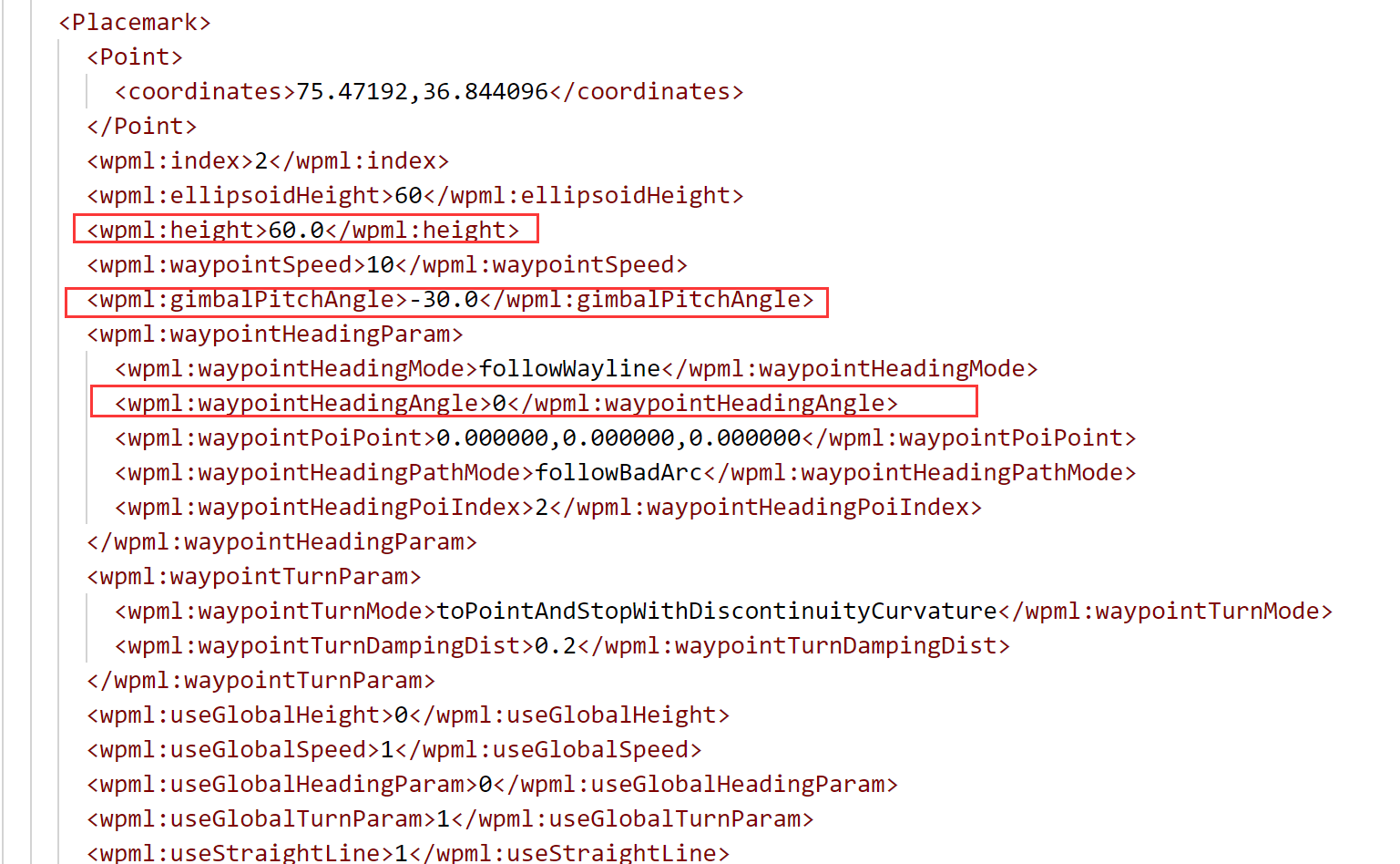
<?xml version="1.0" encoding="UTF-8"?><kml xmlns="http://www.opengis.net/kml/2.2" xmlns:wpml="http://www.dji.com/wpmz/1.0.6"><Document><wpml:author>18027348810</wpml:author><wpml:createTime>1719905121601</wpml:createTime><wpml:updateTime>1719905306699</wpml:updateTime><wpml:missionConfig><wpml:flyToWaylineMode>safely</wpml:flyToWaylineMode><wpml:finishAction>goHome</wpml:finishAction><wpml:exitOnRCLost>goContinue</wpml:exitOnRCLost><wpml:executeRCLostAction>goBack</wpml:executeRCLostAction><wpml:takeOffSecurityHeight>50</wpml:takeOffSecurityHeight><wpml:takeOffRefPoint>23.136550,113.538182,4.854290</wpml:takeOffRefPoint><wpml:takeOffRefPointAGLHeight>3.15864351</wpml:takeOffRefPointAGLHeight><wpml:globalTransitionalSpeed>15</wpml:globalTransitionalSpeed><wpml:globalRTHHeight>100</wpml:globalRTHHeight><wpml:droneInfo><wpml:droneEnumValue>91</wpml:droneEnumValue><wpml:droneSubEnumValue>1</wpml:droneSubEnumValue></wpml:droneInfo><wpml:payloadInfo><wpml:payloadEnumValue>81</wpml:payloadEnumValue><wpml:payloadSubEnumValue>2</wpml:payloadSubEnumValue><wpml:payloadPositionIndex>0</wpml:payloadPositionIndex></wpml:payloadInfo></wpml:missionConfig><Folder><wpml:templateType>waypoint</wpml:templateType><wpml:templateId>0</wpml:templateId><wpml:waylineCoordinateSysParam><wpml:coordinateMode>WGS84</wpml:coordinateMode><wpml:heightMode>relativeToStartPoint</wpml:heightMode></wpml:waylineCoordinateSysParam><wpml:autoFlightSpeed>10</wpml:autoFlightSpeed><wpml:globalHeight>60</wpml:globalHeight><wpml:caliFlightEnable>0</wpml:caliFlightEnable><wpml:gimbalPitchMode>usePointSetting</wpml:gimbalPitchMode><wpml:globalWaypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:globalWaypointHeadingParam><wpml:globalWaypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:globalWaypointTurnMode><wpml:globalUseStraightLine>1</wpml:globalUseStraightLine><Placemark><Point><coordinates>75.463598,36.847751</coordinates></Point><wpml:index>0</wpml:index><wpml:ellipsoidHeight>60</wpml:ellipsoidHeight><wpml:height>60.0</wpml:height><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:gimbalPitchAngle>-45.0</wpml:gimbalPitchAngle><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0.2</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useGlobalHeight>0</wpml:useGlobalHeight><wpml:useGlobalSpeed>1</wpml:useGlobalSpeed><wpml:useGlobalHeadingParam>0</wpml:useGlobalHeadingParam><wpml:useGlobalTurnParam>1</wpml:useGlobalTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:isRisky>0</wpml:isRisky></Placemark><Placemark><Point><coordinates>75.471921,36.847268</coordinates></Point><wpml:index>1</wpml:index><wpml:ellipsoidHeight>60</wpml:ellipsoidHeight><wpml:height>120.0</wpml:height><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:gimbalPitchAngle>-60.0</wpml:gimbalPitchAngle><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>1</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0.2</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useGlobalHeight>0</wpml:useGlobalHeight><wpml:useGlobalSpeed>1</wpml:useGlobalSpeed><wpml:useGlobalHeadingParam>0</wpml:useGlobalHeadingParam><wpml:useGlobalTurnParam>1</wpml:useGlobalTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:isRisky>0</wpml:isRisky></Placemark><Placemark><Point><coordinates>75.47192,36.844096</coordinates></Point><wpml:index>2</wpml:index><wpml:ellipsoidHeight>60</wpml:ellipsoidHeight><wpml:height>60.0</wpml:height><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:gimbalPitchAngle>-30.0</wpml:gimbalPitchAngle><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>2</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0.2</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useGlobalHeight>0</wpml:useGlobalHeight><wpml:useGlobalSpeed>1</wpml:useGlobalSpeed><wpml:useGlobalHeadingParam>0</wpml:useGlobalHeadingParam><wpml:useGlobalTurnParam>1</wpml:useGlobalTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:isRisky>0</wpml:isRisky></Placemark><Placemark><Point><coordinates>75.467063,36.844619</coordinates></Point><wpml:index>3</wpml:index><wpml:ellipsoidHeight>60</wpml:ellipsoidHeight><wpml:height>100.0</wpml:height><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:gimbalPitchAngle>-60.0</wpml:gimbalPitchAngle><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>3</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0.2</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useGlobalHeight>0</wpml:useGlobalHeight><wpml:useGlobalSpeed>1</wpml:useGlobalSpeed><wpml:useGlobalHeadingParam>0</wpml:useGlobalHeadingParam><wpml:useGlobalTurnParam>1</wpml:useGlobalTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:isRisky>0</wpml:isRisky></Placemark><Placemark><Point><coordinates>75.467149,36.848488</coordinates></Point><wpml:index>4</wpml:index><wpml:ellipsoidHeight>60</wpml:ellipsoidHeight><wpml:height>60</wpml:height><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:gimbalPitchAngle>0</wpml:gimbalPitchAngle><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>4</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0.2</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useGlobalHeight>0</wpml:useGlobalHeight><wpml:useGlobalSpeed>1</wpml:useGlobalSpeed><wpml:useGlobalHeadingParam>0</wpml:useGlobalHeadingParam><wpml:useGlobalTurnParam>1</wpml:useGlobalTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:isRisky>0</wpml:isRisky></Placemark><wpml:payloadParam><wpml:payloadPositionIndex>0</wpml:payloadPositionIndex><wpml:focusMode>firstPoint</wpml:focusMode><wpml:meteringMode>average</wpml:meteringMode><wpml:returnMode>singleReturnFirst</wpml:returnMode>
<wpml:samplingRate>240000</wpml:samplingRate>
<wpml:scanningMode>repetitive</wpml:scanningMode><wpml:imageFormat>visable,ir</wpml:imageFormat></wpml:payloadParam></Folder></Document></kml>完整的航线文件是这样的,航线都是可以正常飞行的。就是高度、角度看不到变化。另外,调整相机垂直方向上的角度,waypointHeadingAngle,是这个参数来控制吗 -
前面那个文件是template.kml文件,下面这个是waylines.wpml文件的内容:
<?xml version="1.0" encoding="UTF-8"?><kml xmlns="http://www.opengis.net/kml/2.2" xmlns:wpml="http://www.dji.com/wpmz/1.0.6"><Document><wpml:missionConfig><wpml:flyToWaylineMode>safely</wpml:flyToWaylineMode><wpml:finishAction>goHome</wpml:finishAction><wpml:exitOnRCLost>goContinue</wpml:exitOnRCLost><wpml:executeRCLostAction>goBack</wpml:executeRCLostAction><wpml:takeOffSecurityHeight>50</wpml:takeOffSecurityHeight><wpml:globalTransitionalSpeed>15</wpml:globalTransitionalSpeed><wpml:globalRTHHeight>100</wpml:globalRTHHeight><wpml:droneInfo><wpml:droneEnumValue>91</wpml:droneEnumValue><wpml:droneSubEnumValue>1</wpml:droneSubEnumValue></wpml:droneInfo><wpml:payloadInfo><wpml:payloadEnumValue>81</wpml:payloadEnumValue><wpml:payloadSubEnumValue>2</wpml:payloadSubEnumValue><wpml:payloadPositionIndex>0</wpml:payloadPositionIndex></wpml:payloadInfo></wpml:missionConfig><Folder><wpml:templateId>0</wpml:templateId><wpml:executeHeightMode>relativeToStartPoint</wpml:executeHeightMode><wpml:waylineId>0</wpml:waylineId><wpml:distance>73.6680374145508</wpml:distance><wpml:duration>10.973370552063</wpml:duration><wpml:autoFlightSpeed>10</wpml:autoFlightSpeed><Placemark><Point><coordinates>75.463598,36.847751</coordinates></Point><wpml:index>0</wpml:index><wpml:executeHeight>60.0</wpml:executeHeight><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:waypointGimbalHeadingParam><wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle><wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle></wpml:waypointGimbalHeadingParam><wpml:isRisky>0</wpml:isRisky><wpml:waypointWorkType>0</wpml:waypointWorkType></Placemark><Placemark><Point><coordinates>75.471921,36.847268</coordinates></Point><wpml:index>1</wpml:index><wpml:executeHeight>120.0</wpml:executeHeight><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:waypointGimbalHeadingParam><wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle><wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle></wpml:waypointGimbalHeadingParam><wpml:isRisky>0</wpml:isRisky><wpml:waypointWorkType>0</wpml:waypointWorkType></Placemark><Placemark><Point><coordinates>75.47192,36.844096</coordinates></Point><wpml:index>2</wpml:index><wpml:executeHeight>60.0</wpml:executeHeight><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:waypointGimbalHeadingParam><wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle><wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle></wpml:waypointGimbalHeadingParam><wpml:isRisky>0</wpml:isRisky><wpml:waypointWorkType>0</wpml:waypointWorkType></Placemark><Placemark><Point><coordinates>75.467063,36.844619</coordinates></Point><wpml:index>3</wpml:index><wpml:executeHeight>100.0</wpml:executeHeight><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:waypointGimbalHeadingParam><wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle><wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle></wpml:waypointGimbalHeadingParam><wpml:isRisky>0</wpml:isRisky><wpml:waypointWorkType>0</wpml:waypointWorkType></Placemark><Placemark><Point><coordinates>75.467149,36.848488</coordinates></Point><wpml:index>4</wpml:index><wpml:executeHeight>60</wpml:executeHeight><wpml:waypointSpeed>10</wpml:waypointSpeed><wpml:waypointHeadingParam><wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode><wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle><wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint><wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable><wpml:waypointHeadingPathMode>followBadArc</wpml:waypointHeadingPathMode><wpml:waypointHeadingPoiIndex>0</wpml:waypointHeadingPoiIndex></wpml:waypointHeadingParam><wpml:waypointTurnParam><wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode><wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist></wpml:waypointTurnParam><wpml:useStraightLine>1</wpml:useStraightLine><wpml:waypointGimbalHeadingParam><wpml:waypointGimbalPitchAngle>0</wpml:waypointGimbalPitchAngle><wpml:waypointGimbalYawAngle>0</wpml:waypointGimbalYawAngle></wpml:waypointGimbalHeadingParam><wpml:isRisky>0</wpml:isRisky><wpml:waypointWorkType>0</wpml:waypointWorkType></Placemark></Folder></Document></kml>
请先登录再写评论。
评论
18 条评论