请教下:是否可以通过PSDK获取并简单处理遥测数据吗
已完成
请教下:是否可以通过PSDK获取并简单处理遥测数据后,再将其推送给遥控器或者基于MSDK开发的app吗?想在机载端对遥测数据做智能分析处理,比如将四元数遥测数据转换成欧拉角的坐标系。如果可以,PSDK对应的获取和转发API是哪个呢?MSDK对应的获取API是哪个呢?
-

您好,是可以的,比如PSDK程序获取四元数https://sdk-forum.dji.net/hc/zh-cn/articles/360023657273-%E5%A6%82%E4%BD%95%E5%B0%86%E5%9B%9B%E5%85%83%E6%95%B0%E8%BD%AC%E6%8D%A2%E6%88%90%E6%97%A0%E4%BA%BA%E6%9C%BA%E5%A7%BF%E6%80%81%E8%A7%92 获取以后,可以通过DjiLowSpeedDataChannel_SendData接口发送给MSDK。MSDK端是:addPayloadDataListener -
您好,这个是MSDK的sample代码,您可以在此处了解: https://developer.dji.com/doc/mobile-sdk-tutorial/cn/tutorials/payload2.html -
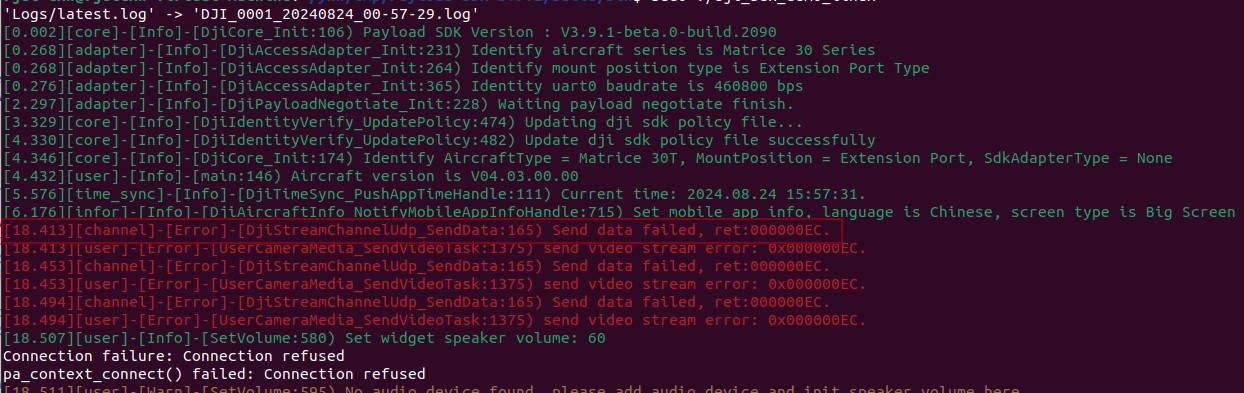
环境:linux系统,其他信息如下:
[0.002][core]-[Info]-[DjiCore_Init:106) Payload SDK Version : V3.9.1-beta.0-build.2090
[1.018][adapter]-[Info]-[DjiAccessAdapter_Init:231) Identify aircraft series is Matrice 30 Series
[1.018][adapter]-[Info]-[DjiAccessAdapter_Init:264) Identify mount position type is Extension Port Type
[1.028][adapter]-[Info]-[DjiAccessAdapter_Init:365) Identity uart0 baudrate is 460800 bps
[1.044][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:474) Updating dji sdk policy file...
[2.056][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:482) Update dji sdk policy file successfully
[2.104][core]-[Info]-[DjiCore_Init:174) Identify AircraftType = Matrice 30T, MountPosition = Extension Port, SdkAdapterType = None
[2.238][user]-[Info]-[main:146) Aircraft version is V04.03.00.00 -
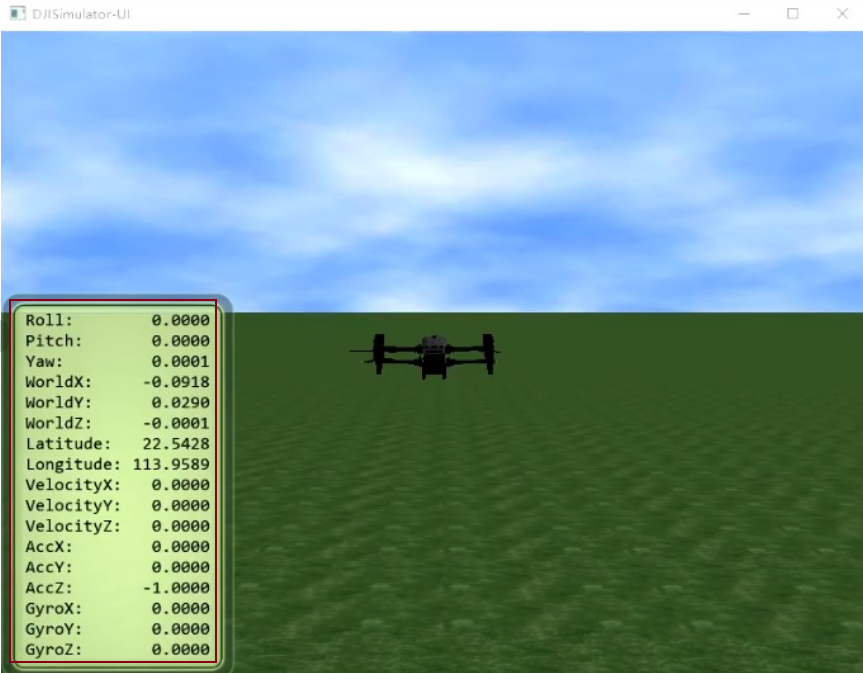
您好,档位P模式您直接在遥控器上设置,PSDK中是无法设置的。 关于您提到的WorldX、WorldY、WorldZ是您在模拟器中的坐标,以第一次飞机进入模拟器时的位置为原点,这三个数值记录离原点的距离,这个在PSDK中没办法拿到的,是模拟器特有的数据。 Latitude、Longitude您可以通过GPS的TOPIC:DJI_FC_SUBSCRIPTION_TOPIC_GPS_POSITION 来查看。VelocityX、VelocityY、VelocityZ可以通过订阅:DJI_FC_SUBSCRIPTION_TOPIC_VELOCITY。AccX、AccY、AccZ对应的是DJI_FC_SUBSCRIPTION_TOPIC_ACCELERATION_RAW,GyroX、GyroY、GyroZ对应的是DJI_FC_SUBSCRIPTION_TOPIC_ACCELERATION_RAW。 >PSDK示例程序有“无GPS环境下,仅推荐使用油门、姿态角控制无人机”的sample吗?这个sample是指速度控制模式吗? 这个指的是姿态角控制的,您可以看下: https://developer.dji.com/doc/payload-sdk-tutorial/cn/function-set/basic-function/flight-control.html






请先登录再写评论。
评论
51 条评论