Multiple Applications Communicating Simultaneously with DJI SDK
已完成
Hello,
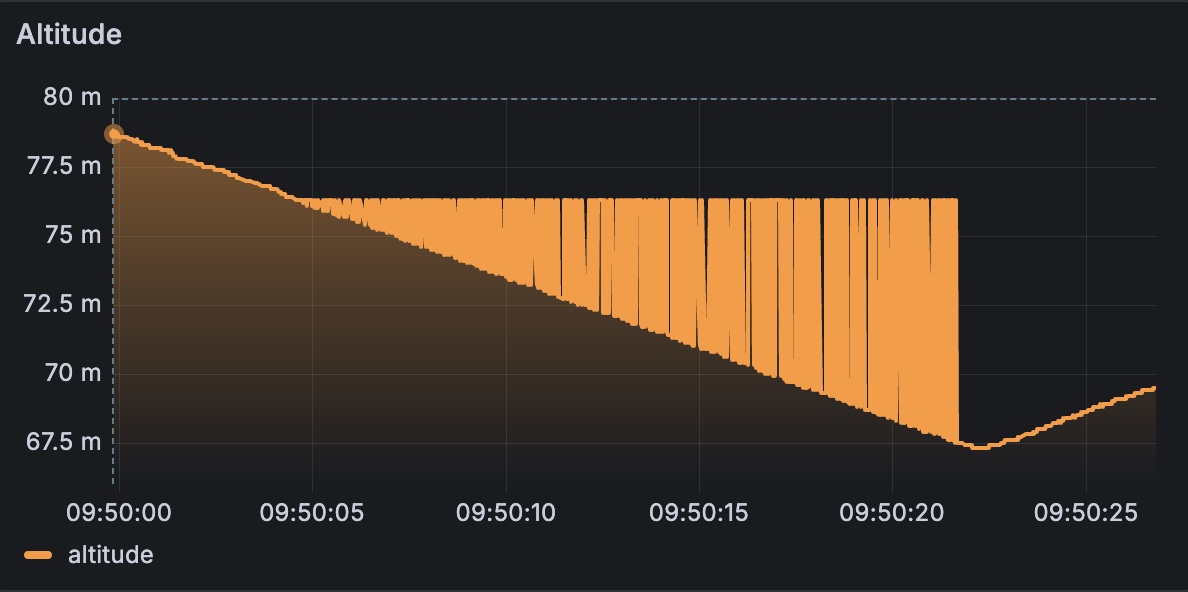
We are experiencing some issues while running multiple applications that communicate with the DJI SDK simultaneously. Specifically, we are observing irregularities in the altitude readings during drone operations, as illustrated in the attached graph.
We also have the same problem with the latitude and longitude of the drone and sometimes with the yaw or the pitch. It gives us the same graphic.
We want to know if there are potential impacts for having multiple applications interact with the DJI SDK at the same time.
Are there known limitations or configurations that we should be aware of to prevent such issues?
Thank you for your assistance.
-
If you use an app and another app is running in the background, which you have not manually stopped, and both apps use the same SDK, they may conflict.
For example, consider using “AppA” and previously using “AppB” without properly closing it through “Settings > Apps > Force Stop” and the both app, when they are running, interact with the same SDK. I would like to know if there will be specific issue that can lead to the graph that i mentioned.
I am using the SDK 5.
-

Thank you for your detailed description. If there are two apps developed using the SDK running here, then the app that is in the foreground will be the only one to successfully receive aircraft data. Typically, the app running in the background will not be able to receive aircraft data. I noticed that the abnormal altitude in your graph seems to always be the same. Have you identified the source of this erroneous data? -
Thank you for the response, indeed this does not seem to be due to the fact that another app is running in the background. However, we still notice this error many times and it also impacts the longitude and latitude of the drone.
A clear example is the failure to stop the drone at a waypoint. We tell him to go to a GPS location for example, and according to the app he doesn't move while in reality he moves, and he then goes beyond his waypoint before finding his latitude and longitude which has frozen and going back to its waypoint. This is very restrictive and relatively dangerous.
We still haven't found the source of the problem, we are looking for it.
For info, we use a DJI M300 drone. -
We have identified the problem. In fact, we are able to use RTK, and we are monitoring a listener that tells us whether we are using RTK or not. However, we have noticed that this listener is constantly sending notifications, which creates an infinite loop where we have to keep telling it to use GPS coordinates instead of RTK, for example. This causes freezes. This is the only explanation we have found, although we do not understand why the RTK listener is constantly sending notifications.
请先登录再写评论。
评论
6 条评论