Try identify UART0 connection timeout using OSDK expansion kit
已完成
I am currently trying to run the PSDK sample program on Jetson Nano but it doesn’t work.
The development environment is as follows
Development environment (Software):
Ubuntu: 18.04
DJI PayloadSDK: 3.9.0(latest)
Matrice’s Firmware: V7.00.0100
Development environment (Hardware):
Onboard computer: Jetson Nano Developer kit
Drone: Matrice 300 RTK
connection: DJI Onboard SDK expansion module (not Eport because I already have it)
I’m trying to ran PSDK sample program according to the official website "https://developer.dji.com/doc/payload-sdk-tutorial/en/quick-start/run-sample-code.html"
I got the following error code.
-----------------------------------------------------------------------------------------------------
/bin$ sudo ./dji_sdk_demo_linux_cxx
'Logs/latest.log' -> 'DJI_0021_20240618_15-37-36.log'
[0.026][core]-[Info]-[DjiCore_Init:106) Payload SDK Version : V3.9.0-beta.0-build.2044
[2.396][adapter]-[Info]-[DjiAccessAdapter_Init:215) Try identify UART0 connection failed. Probably because SDK adapter or aircraft not finish init or UART connect error.
...
[22.012][adapter]-[Info]-[DjiAccessAdapter_Init:215) Try identify UART0 connection failed. Probably because SDK adapter or aircraft not finish init or UART connect error.
[22.012][adapter]-[Error]-[DjiAccessAdapter_Init:220) Try identify UART0 connection timeout. Probably because SDK adapter or aircraft not finish init or UART connect error.
[22.012][core]-[Error]-[DjiCore_Init:126) Access adapter init error, stat:225
terminate called after throwing an instance of 'std::runtime_error'
what(): Core init error.
Aborted
-----------------------------------------------------------------------------------------------------
I already confime these things.
- DJI expansion module is recognized by Jetson Nano as /dev/ttyACM0
- The RX TX pins are connected in the correct orientation
I would like to know what I can do to solve this problem.
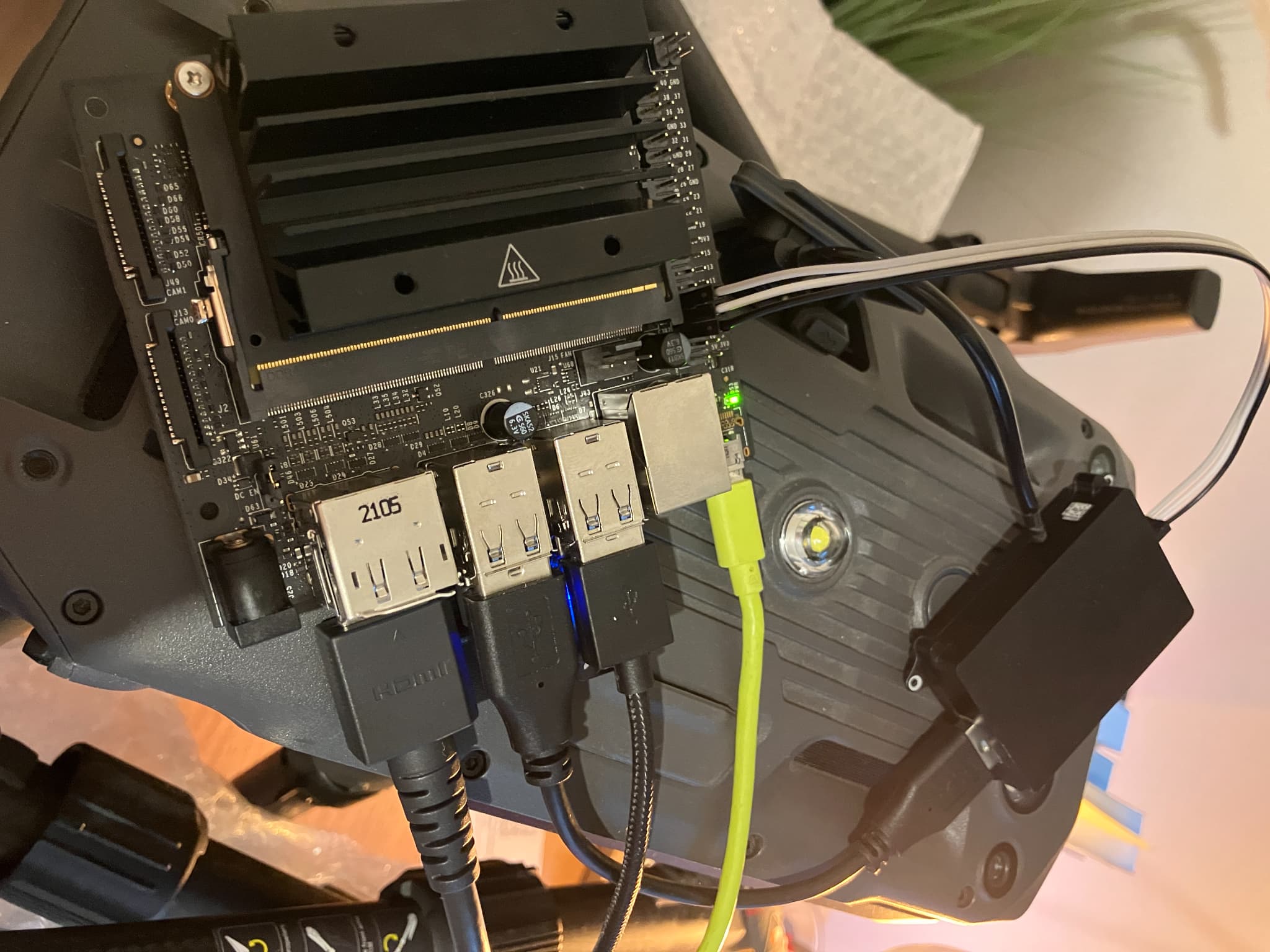
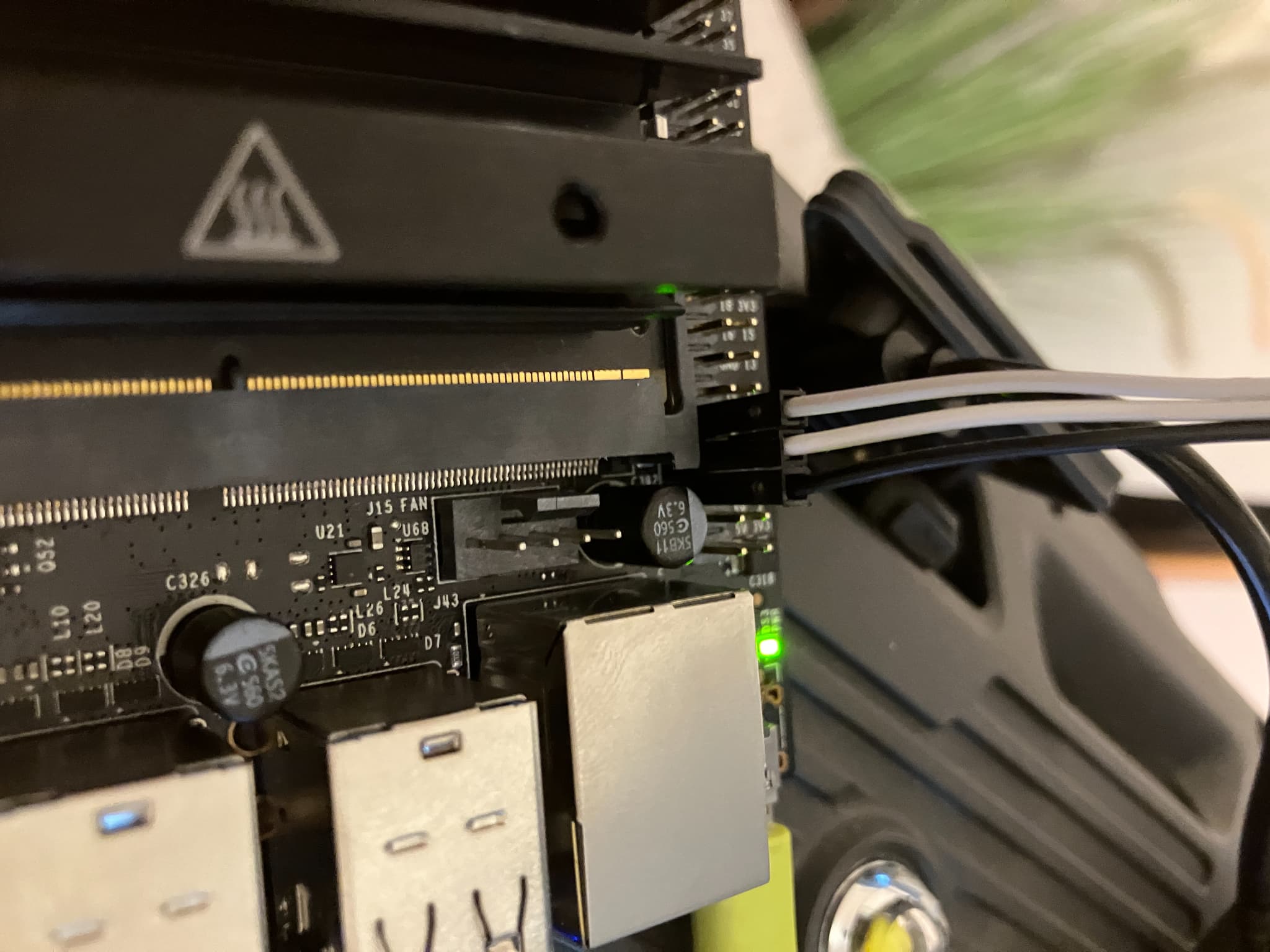
 I also provide hardware connection.
I also provide hardware connection.
Thanks
-

Dear Keita Imaizumi, Greetings. We have observed that the firmware version of your drone is outdated. We recommend upgrading it to the latest version for use with 3.9.0 PSDK. After the upgrade, please verify the serial port configuration in the hal_uart.h file to ensure that it corresponds to the actual port. The error mainly indicates the inability to locate the DEV1 port.
请先登录再写评论。
评论
1 条评论