PSDK 3.5 + M350 运行sample中的 UserCameraMedia_SendVideoTask, 遥控器上接收不到视频流
已完成
同样的情况 M300 + PSDK3.5 是可以的,虽然也有报错Set bandwidth proportion for high speed channel error, stat:0x00000103.
M300 log如下:
~ sudo /home/up2/Desktop/Payload-SDK/build/bin/dji_sdk_demo_linux_cxx
[0.003][core]-[Info]-[DjiCore_Init:101) Payload SDK Version : V3.5.0-beta.0-build.1765
[0.003][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.028][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.154][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.280][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.408][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.463][adapter]-[Info]-[DjiAccessAdapter_Init:186) Identify aircraft series is Matrice 300 Series
[0.463][adapter]-[Info]-[DjiAccessAdapter_Init:206) Identify mount position type is Payload Port Type
[0.463][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.491][adapter]-[Info]-[DjiAccessAdapter_Init:301) Identity uart0 baudrate is 460800 bps
[0.496][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[1.496][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[2.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[3.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[4.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[5.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[6.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[7.497][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[8.498][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[9.498][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[10.498][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[12.524][user]-[Info]-[HalNetWork_Init:67) cmdStr: sudo ifconfig eth0 up
[12.561][user]-[Info]-[HalNetWork_Init:82) cmdStr: sudo ifconfig eth0 192.168.120.2 netmask 255.255.128.0
[12.597][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[12.648][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[13.648][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[14.649][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[15.649][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[16.650][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[17.650][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[18.650][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[19.650][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[20.650][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[21.651][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[22.651][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[24.938][user]-[Info]-[HalNetWork_Init:67) cmdStr: sudo ifconfig eth0 up
[24.965][user]-[Info]-[HalNetWork_Init:82) cmdStr: sudo ifconfig eth0 192.168.120.2 netmask 255.255.128.0
[24.991][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:470) Updating dji sdk policy file...
[25.991][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:473) Update dji sdk policy file successfully
[27.022][infor]-[Info]-[DjiAircraftInfo_GetAdapterSerialNumber:680) Get serial number of Skyport V2 or X-Port is 39CBK7C0010016
[27.026][core]-[Info]-[DjiCore_Init:169) Identify AircraftType = Matrice 300 RTK, MountPosition = Payload Port NO1, SdkAdapterType = Skyport V2
[27.582][core]-[Info]-[DjiCore_ApplicationStart:239) Start dji sdk application
[27.582][user]-[Info]-[DjiUser_ApplicationStart:262) Application start.| Available commands: |
| [0] Fc subscribe sample - subscribe quaternion and gps data |
| [1] Flight controller sample - take off landing |
| [2] Flight controller sample - take off position ctrl landing |
| [3] Flight controller sample - take off go home force landing |
| [4] Flight controller sample - take off velocity ctrl landing |
| [5] Flight controller sample - arrest flying |
| [6] Flight controller sample - set get parameters |
| [7] Hms info sample - get health manger system info |
| [8] Waypoint 2.0 sample - run airline mission by settings (only support on M300 RTK) |
| [9] Waypoint 3.0 sample - run airline mission by kmz file (not support on M300 RTK) |
| [a] Gimbal manager sample |
| [c] Camera stream view sample - display the camera video stream |
| [d] Stereo vision view sample - display the stereo image |
| [e] Start camera all features sample - you can operate the camera on DJI Pilot |
| [f] Start gimbal all features sample - you can operate the gimbal on DJI Pilot |
| [g] Start widget all features sample - you can operate the widget on DJI Pilot |
| [h] Start widget speaker sample - you can operate the speaker on DJI Pilot2 |
| [i] Start power management sample - you will see notification when aircraft power off |
| [j] Start data transmission sample - you can send or recv custom data on MSDK demo |
| [k] Run camera manager sample - you can test camera's functions interactively |[54.739][time_sync]-[Info]-[DjiTimeSync_PushAppTimeHandle:111) Current time: 2023.07.25 18:53:02.
[60.588][infor]-[Info]-[DjiAircraftInfo_NotifyMobileAppInfoHandle:589) Set mobile app info, language is Chinese, screen type is Big Screen
e
[86.924][channel]-[Error]-[DjiHighSpeedDataChannel_Init:248) Data channel work node create error.
[86.924][channel]-[Error]-[DjiHighSpeedDataChannel_SetBandwidthProportion:416) Init high speed data channel error: 0x00000103.
[86.924][user]-[Error]-[StartDownloadNotification:1119) Set bandwidth proportion for high speed channel error, stat:0x00000103.
[86.924][downloader]-[Error]-[DjiDownloadFile_GetObject:137) Can't find download data object
[86.924][downloader]-[Error]-[DjiDownloadDataList_Init:96) Can't get download file object, type = 14
[86.924][downloader]-[Error]-[DjiDataDownloader_DataStartSend:407) Download data init error, stat = 0x000000E2
[86.924][downloader]-[Error]-[DjiDataDownloader_EventException:763) Run Event Function Exception ! srcState = 0, event = -1
[86.945][channel]-[Error]-[DjiHighSpeedDataChannel_Init:248) Data channel work node create error.
[86.945][channel]-[Error]-[DjiHighSpeedDataChannel_SetBandwidthProportion:416) Init high speed data channel error: 0x00000103.
[86.945][user]-[Error]-[StopDownloadNotification:1139) Set bandwidth proportion for high speed channel error, stat:0x00000103.
[89.188][user]-[Info]-[main:147) Start camera all feautes sample successfully
[89.188][user]-[Error]-[UserCameraMedia_SendVideoTask:1193) curFileDirPath: /home/up2/Desktop/Payload-SDK/samples/sample_c/module_sample/camera_emu/
[89.188][user]-[Error]-[UserCameraMedia_SendVideoTask:1195) tempPath: /home/up2/Desktop/Payload-SDK/samples/sample_c/module_sample/camera_emu/media_file/PSDK_0005.h264
[90.451][user]-[Info]-[UserCameraMedia_SendVideoTask:1295) frameInfo: 0
[90.453][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[90.485][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[90.518][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[90.551][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[90.584][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[90.617][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
-
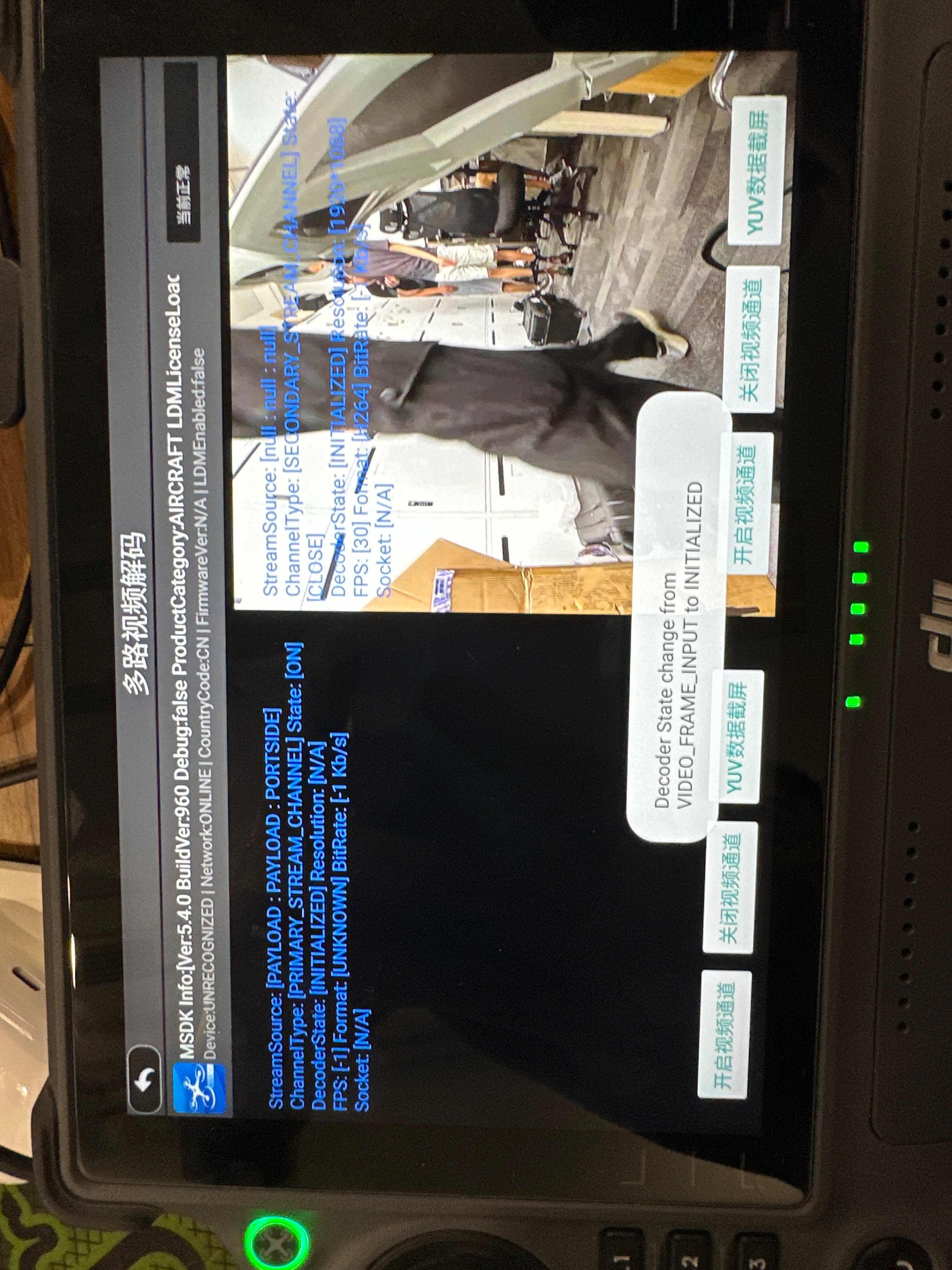
同样的设备,M350运行如下,APP上看不到视频流
WindApp: use bin version
➜ ~ sudo /home/up2/Desktop/Payload-SDK/build/bin/dji_sdk_demo_linux_cxx
[0.002][core]-[Info]-[DjiCore_Init:101) Payload SDK Version : V3.5.0-beta.0-build.1765
[0.003][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.033][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.161][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.288][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.416][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.474][adapter]-[Info]-[DjiAccessAdapter_Init:186) Identify aircraft series is Matrice 350 Series
[0.474][adapter]-[Info]-[DjiAccessAdapter_Init:206) Identify mount position type is Payload Port Type
[0.474][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[0.503][adapter]-[Info]-[DjiAccessAdapter_Init:301) Identity uart0 baudrate is 460800 bps
[0.507][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[1.507][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[2.508][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[3.508][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[4.508][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[6.528][user]-[Info]-[HalNetWork_Init:67) cmdStr: sudo ifconfig eth0 up
[6.557][user]-[Info]-[HalNetWork_Init:82) cmdStr: sudo ifconfig eth0 192.168.120.2 netmask 255.255.128.0
[6.594][user]-[Info]-[HalUart_Init:95) systemCmd:sudo chmod 777 /dev/ttyTHS0
[6.673][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[7.673][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[8.673][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[9.673][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[10.673][adapter]-[Info]-[DjiPayloadNegotiate_Init:212) Waiting payload negotiate finished.
[13.049][user]-[Info]-[HalNetWork_Init:67) cmdStr: sudo ifconfig eth0 up
[13.074][user]-[Info]-[HalNetWork_Init:82) cmdStr: sudo ifconfig eth0 192.168.120.2 netmask 255.255.128.0
[13.101][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:470) Updating dji sdk policy file...
[14.101][core]-[Info]-[DjiIdentityVerify_UpdatePolicy:473) Update dji sdk policy file successfully
[15.142][infor]-[Info]-[DjiAircraftInfo_GetAdapterSerialNumber:680) Get serial number of Skyport V2 or X-Port is 39CBK7C0010016
[15.146][core]-[Info]-[DjiCore_Init:169) Identify AircraftType = Matrice 350 RTK, MountPosition = Payload Port NO1, SdkAdapterType = Skyport V2
[15.689][core]-[Info]-[DjiCore_ApplicationStart:239) Start dji sdk application
[15.689][user]-[Info]-[DjiUser_ApplicationStart:262) Application start.
[16.107][time_sync]-[Info]-[DjiTimeSync_PushAppTimeHandle:111) Current time: 2023.07.25 19:03:14.
[17.497][infor]-[Info]-[DjiAircraftInfo_NotifyMobileAppInfoHandle:589) Set mobile app info, language is Chinese, screen type is Big Screen| Available commands: |
| [0] Fc subscribe sample - subscribe quaternion and gps data |
| [1] Flight controller sample - take off landing |
| [2] Flight controller sample - take off position ctrl landing |
| [3] Flight controller sample - take off go home force landing |
| [4] Flight controller sample - take off velocity ctrl landing |
| [5] Flight controller sample - arrest flying |
| [6] Flight controller sample - set get parameters |
| [7] Hms info sample - get health manger system info |
| [8] Waypoint 2.0 sample - run airline mission by settings (only support on M300 RTK) |
| [9] Waypoint 3.0 sample - run airline mission by kmz file (not support on M300 RTK) |
| [a] Gimbal manager sample |
| [c] Camera stream view sample - display the camera video stream |
| [d] Stereo vision view sample - display the stereo image |
| [e] Start camera all features sample - you can operate the camera on DJI Pilot |
| [f] Start gimbal all features sample - you can operate the gimbal on DJI Pilot |
| [g] Start widget all features sample - you can operate the widget on DJI Pilot |
| [h] Start widget speaker sample - you can operate the speaker on DJI Pilot2 |
| [i] Start power management sample - you will see notification when aircraft power off |
| [j] Start data transmission sample - you can send or recv custom data on MSDK demo |
| [k] Run camera manager sample - you can test camera's functions interactively |e
[50.793][channel]-[Error]-[DjiHighSpeedDataChannel_Init:248) Data channel work node create error.
[50.793][channel]-[Error]-[DjiHighSpeedDataChannel_SetBandwidthProportion:416) Init high speed data channel error: 0x00000103.
[50.793][user]-[Error]-[StartDownloadNotification:1119) Set bandwidth proportion for high speed channel error, stat:0x00000103.
[50.793][downloader]-[Error]-[DjiDownloadFile_GetObject:137) Can't find download data object
[50.793][downloader]-[Error]-[DjiDownloadDataList_Init:96) Can't get download file object, type = 14
[50.793][downloader]-[Error]-[DjiDataDownloader_DataStartSend:407) Download data init error, stat = 0x000000E2
[50.793][downloader]-[Error]-[DjiDataDownloader_EventException:763) Run Event Function Exception ! srcState = 0, event = -1
[50.808][channel]-[Error]-[DjiHighSpeedDataChannel_Init:248) Data channel work node create error.
[50.808][channel]-[Error]-[DjiHighSpeedDataChannel_SetBandwidthProportion:416) Init high speed data channel error: 0x00000103.
[50.808][user]-[Error]-[StopDownloadNotification:1139) Set bandwidth proportion for high speed channel error, stat:0x00000103.
[53.680][user]-[Info]-[main:147) Start camera all feautes sample successfully
[53.681][user]-[Error]-[UserCameraMedia_SendVideoTask:1193) curFileDirPath: /home/up2/Desktop/Payload-SDK/samples/sample_c/module_sample/camera_emu/
[53.681][user]-[Error]-[UserCameraMedia_SendVideoTask:1195) tempPath: /home/up2/Desktop/Payload-SDK/samples/sample_c/module_sample/camera_emu/media_file/PSDK_0005.h264
[55.018][user]-[Info]-[UserCameraMedia_SendVideoTask:1295) frameInfo: 0
[55.020][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.057][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.091][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.124][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.158][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.191][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.224][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
[55.262][user]-[Info]-[UserCameraMedia_SendVideoTask:1394) video stream state: realtimeBandwidthLimit: 1048576, realtimeBandwidthBeforeFlowController: 0, realtimeBandwidthAfterFlowController:0 busyState: 0.
请先登录再写评论。
评论
3 条评论