The m300 rtk pauses after taking off 1m after waypoint mission start.

When I start a waypoint mission on m300 rtk in MSDK 5.4.0, after taking off 1m, it will be paused.
The following error occurs in WaylineExecutingInterruptReason:
ErrorImp{erroType='WAYPOINT', errorCode='REQUEST_HANDLER_NOT_FOUND', innerCode = '-1', description='null', hint=''}
The error doesn't always happen, but it does happen often.
And if I start the mission while hovering, it doesn't happen.
Other drones like the M30T have no issues.
Thank you.
-

I would like to get some details to analyze the problem you are experiencing, here are my questions. 1.Does the aircraft have RTK turned on? 2.Do IDeviceStatusManager and IDeviceHealthManager indicate the current status of the aircraft? 3.Is there any indication of the status of the aircraft on Pilot 2? 4.What is the version of the aircraft firmware you are using? -
1. RTK is off.
2. I'm not using IDeviceStatusManager and IDeviceHealthManager in my app.
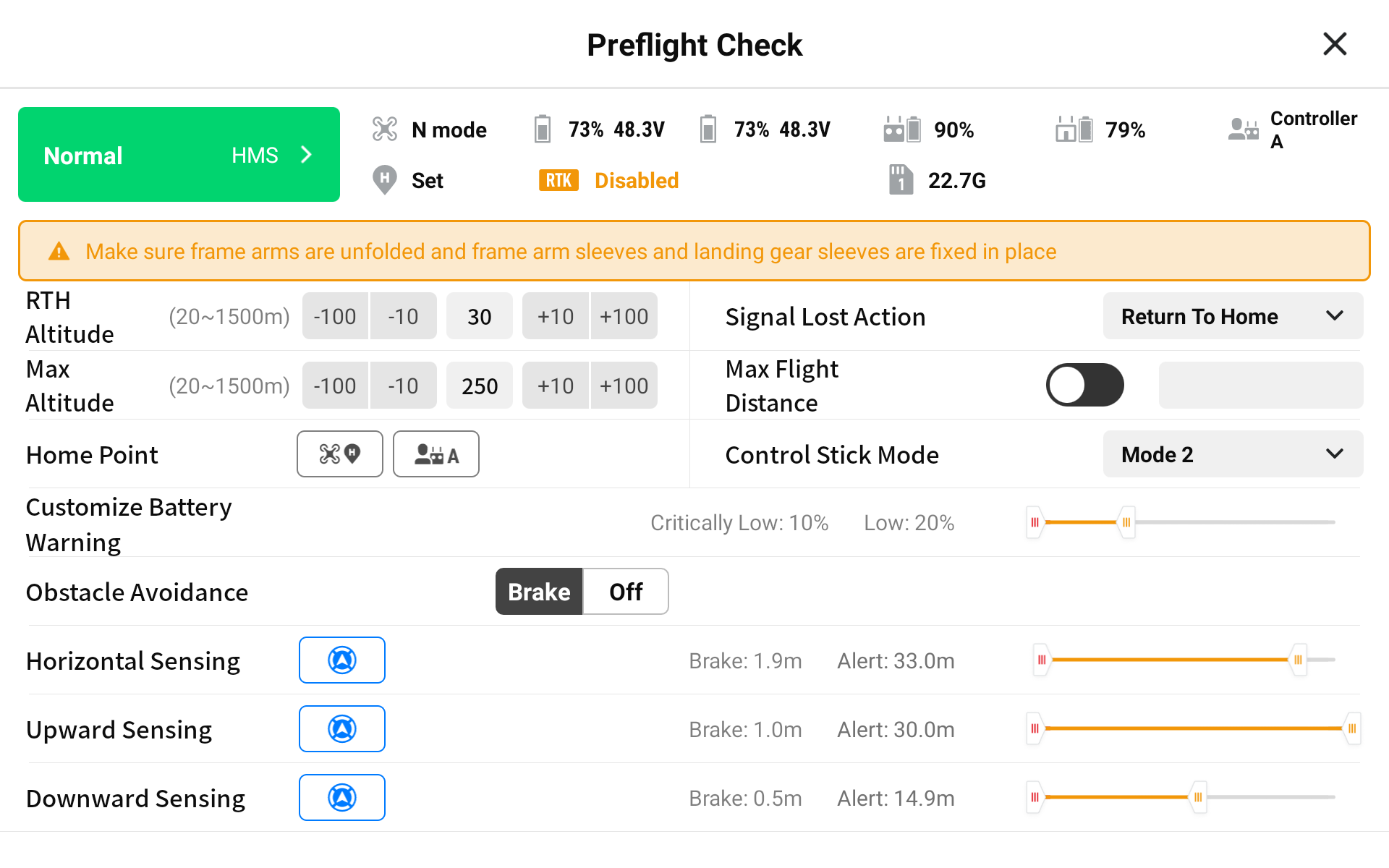
3. When I upload the KMZ file created in my app in Pilot 2 and start the mission, the message "Max flight altitude reached. Flight route mission paused." appears. However, the altitude of the waypoint is set to 30m and the Max Altitude is set to 250m in the Preflight Check.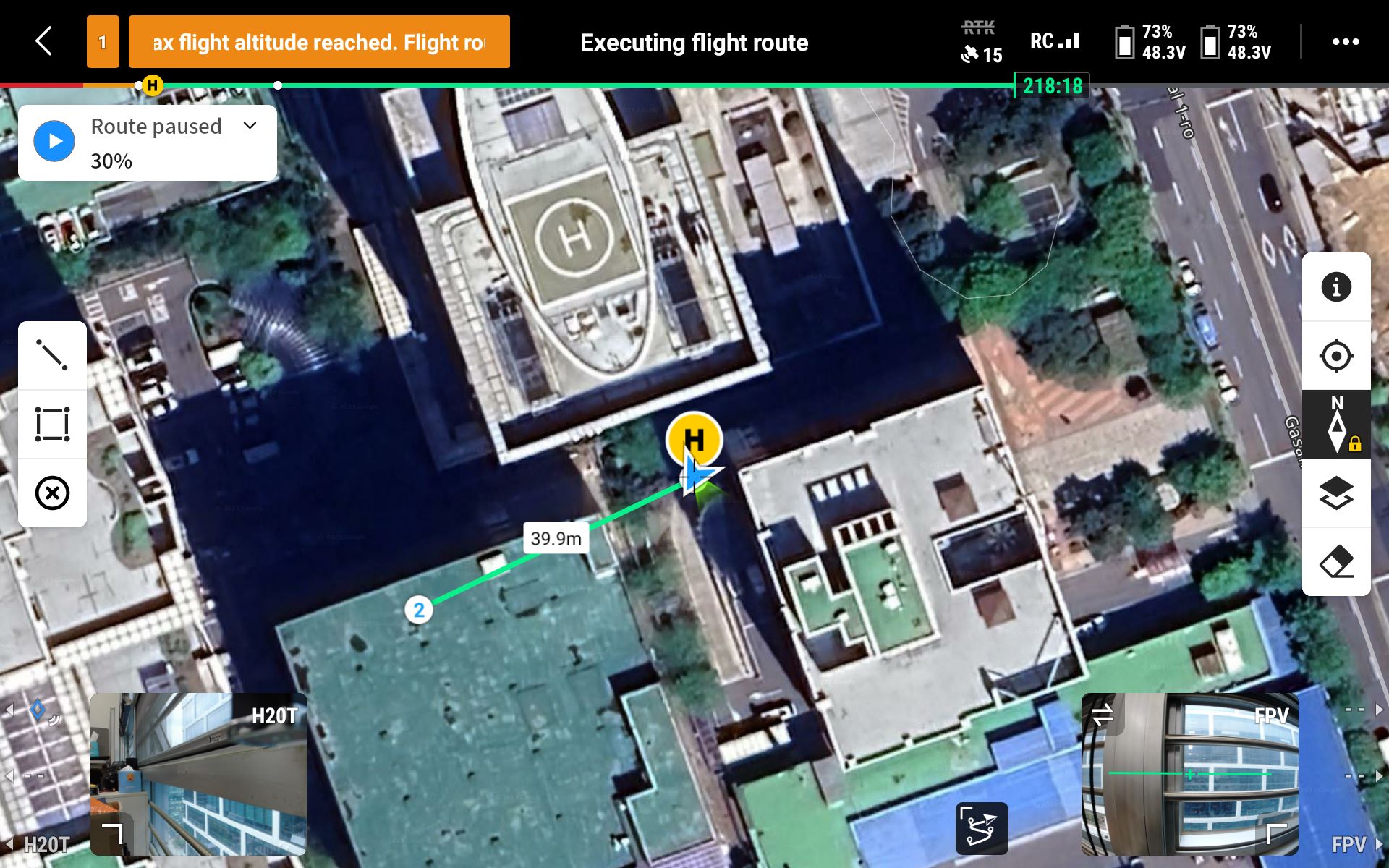
4. aicraft firmware : 57.00.0100
Thank you. -
Could you send us your kmz file for analysis? Here is uploading link:https://pan-sec.djicorp.com/s/wBBcpapeoCid5bm -
I put waylines.wpml and template.kml inside the wpmz folder, but the same problem appears.
I uploaded a modified djiWaypoint.kmz to this address.
https://pan-sec.djicorp.com/s/wBBcpapeoCid5bm
Thank you. -
https://pan-sec.djicorp.com/s/wBBcpapeoCid5bm You can check out the video in the link, the problem you provided is executed properly on the emulator. I think there is nothing wrong with your file. -
I uploaded a video with the problem.
Set the first waypoint of the mission to be uploaded to the same location as the drone.
1. Turn on the power of the drone, upload a mission, and start it. It works normally.
2. When I land the drone and restart it, it goes into a paused state.
3. If I move the location of the drone and start it again, it works normally.
In my opinion, when the current drone position and the first waypoint are at the same location, the first start is normal, but after that, the probability of bugs increases.
Thank you. -
In the video you uploaded, the firmware version of the drone is 07.00.0100.
My firmware version is 57.00.0100.
Could it be a firmware version issue?
I downloaded "Matrice 300 RTK UAV Offline Firmware Update(Support RC PLUS) v57.00.01.00" from this address.
https://enterprise.dji.com/kr/matrice-300/downloads
The firmware update was installed by Dji Assistant 2.
I paired the RC Plus with the drone.
The firmware version of RC plus is 01.02.0443.
Thank you. -
Thank you for bringing this to our attention. After testing the M300 with the V57, I was able to reproduce the issue you reported. It seems that the problem is more likely to occur after restarting from the aircraft. I apologize for any inconvenience this may have caused you. I will work with our engineers to confirm the cause of this problem. Please bear with us as we investigate further. -
We conducted the same test on Pilot 2 and found that the issue also exists on Pilot 2. Therefore, it may not be an SDK issue, but a more fundamental problem. We are unable to handle such issues directly, so I suggest that you send the problem to support@dji.com for processing. Of course, you can also send us the email, and I will forward your problem to the corresponding team.
请先登录再写评论。
评论
14 条评论