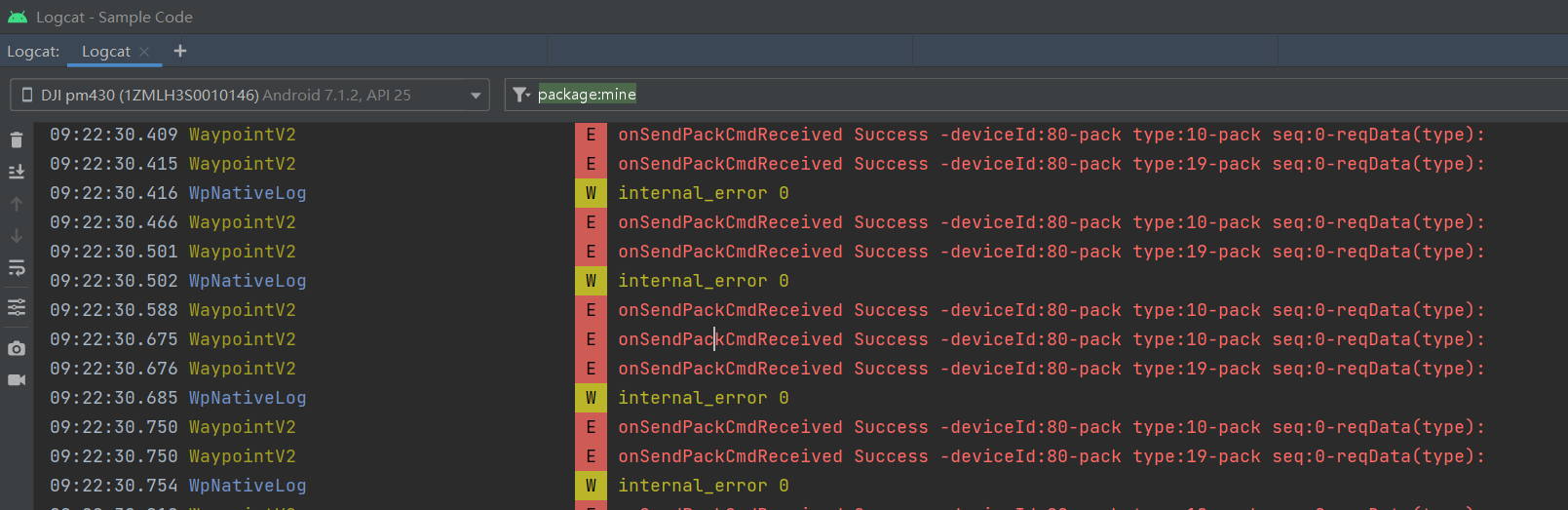
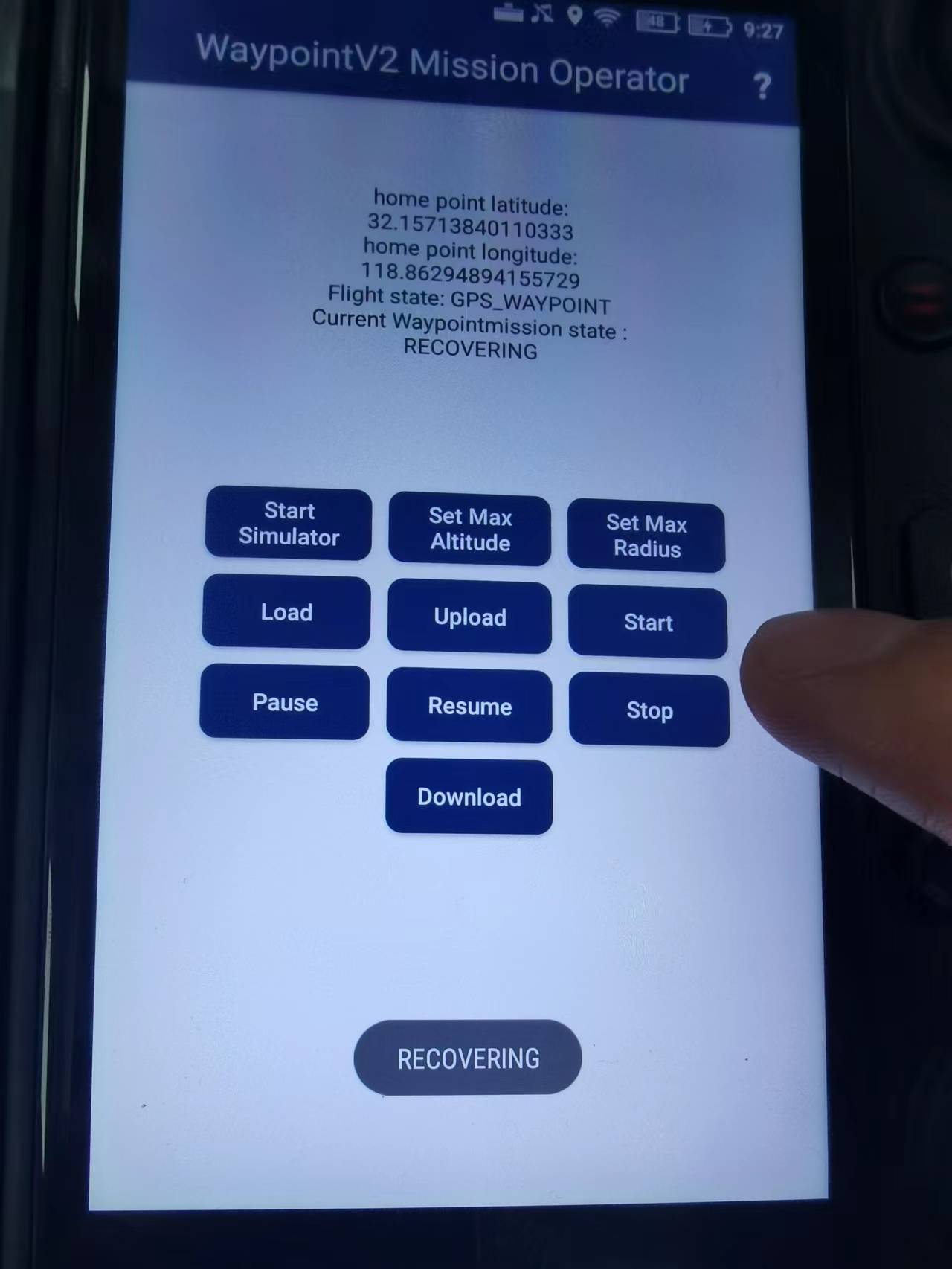
MSDK V4.16.4 M300 RTK 航线任务状态为RECOVERING,后续需要怎么处理才能stopMission? 已完成 关注 zy 2年前 在APP杀掉再重新进入界面,航线任务状态为RECOVERING,是不是代表不能对航线进行任何操作? 0


评论
7 条评论