M300无人机是否有API接口使双云台同步?
已完成
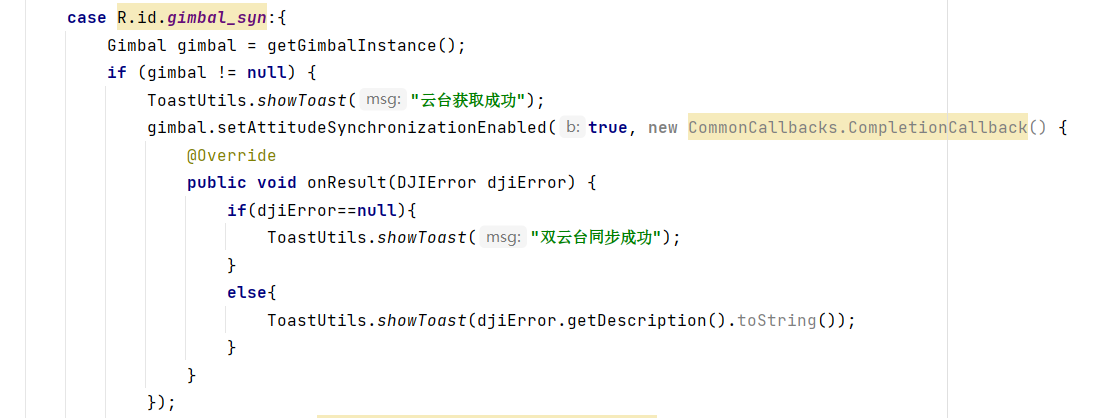
MSKD V4版本的。请问一下M300无人机挂载了双云台,现在想要使双云台的姿态保存一致,是否有这样的API接口?类似M210的setAttitudeSynchronizationEnabled函数之类的。
-

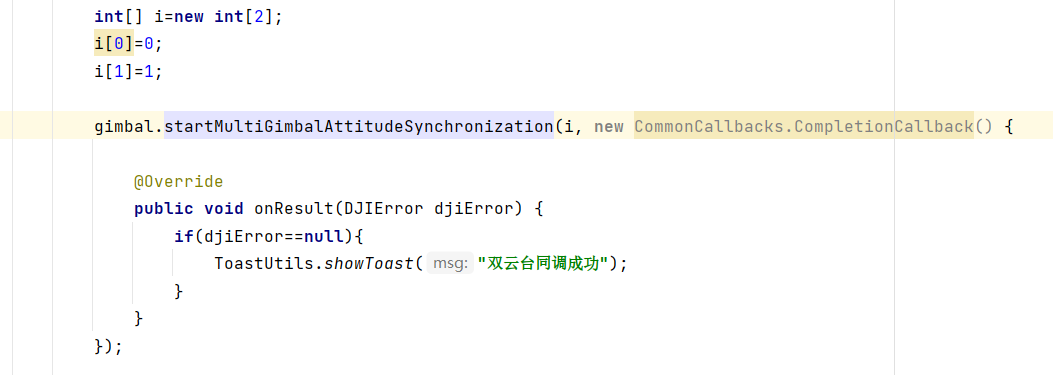
文档写得很清楚啊,你只需要将云台位置作为int array传入即可。 

{kind=link}
请先登录再写评论。
评论
13 条评论