v5航线任务
已完成

编写waylines.wpml文件的时候, 这几个参数是否是必须的, 因为根据文档上的描述, 需要额外添加3个以useGlobal开头的标签, 而这篇文章当中给出的模板是没有这3个额外标签的.
当时, 在航线任务开发的时候, 自己编写生成的kmz压缩包中, wpmz文件夹下, 是否可是只包含waylines.wpml文件, 而没有res和temaplate.kml.
-

应该是文档漏了,他们的说明在template.kml文档里,你都添加上吧。应该和template.kml的用法一样。压缩的kmz包可以没有res文件夹,必须有template.kml和waylines.wpml,template.kml你写个空的就行,看这篇文章,https://sdk-forum.dji.net/hc/zh-cn/articles/12560010128153 -
<Placemark>
<Point>
<coordinates>
113.417553839759,23.1697556054741
</coordinates>
</Point>
<wpml:index>0</wpml:index>
<wpml:executeHeight>100</wpml:executeHeight>
<wpml:waypointSpeed>7</wpml:waypointSpeed>
<wpml:waypointHeadingParam>
<wpml:waypointHeadingMode>followWayline</wpml:waypointHeadingMode>
<wpml:waypointHeadingAngle>0</wpml:waypointHeadingAngle>
<wpml:waypointPoiPoint>0.000000,0.000000,0.000000</wpml:waypointPoiPoint>
<wpml:waypointHeadingAngleEnable>0</wpml:waypointHeadingAngleEnable>
</wpml:waypointHeadingParam>
<wpml:waypointTurnParam>
<wpml:waypointTurnMode>toPointAndStopWithDiscontinuityCurvature</wpml:waypointTurnMode>
<wpml:waypointTurnDampingDist>0</wpml:waypointTurnDampingDist>
</wpml:waypointTurnParam>
<wpml:useStraightLine>1</wpml:useStraightLine>
<wpml:actionGroup>
<wpml:actionGroupId>0</wpml:actionGroupId>
<wpml:actionGroupStartIndex>0</wpml:actionGroupStartIndex>
<wpml:actionGroupEndIndex>0</wpml:actionGroupEndIndex>
<wpml:actionGroupMode>sequence</wpml:actionGroupMode>
<wpml:actionTrigger>
<wpml:actionTriggerType>reachPoint</wpml:actionTriggerType>
</wpml:actionTrigger>
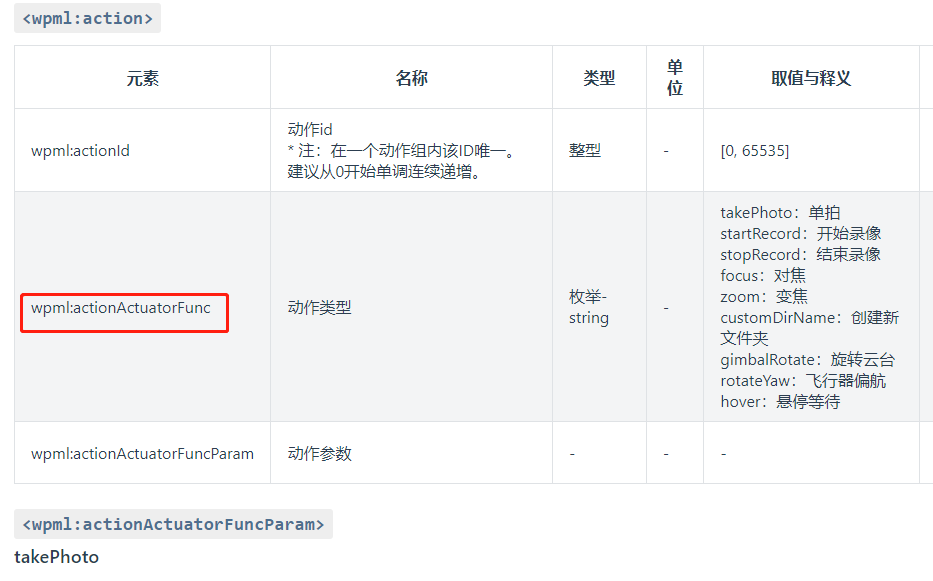
<wpml:action>
<wpml:actionId>0</wpml:actionId>
<wpml:actionActuatorFunc>takePhoto</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:fileSuffix>航点1</wpml:fileSuffix>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
<wpml:payloadLensIndex>wide</wpml:payloadLensIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
<wpml:action>
<wpml:actionId>1</wpml:actionId>
<wpml:actionActuatorFunc>gimbalRotate</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:gimbalRotateMode>absoluteAngle</wpml:gimbalRotateMode>
<wpml:gimbalPitchRotateEnable>1</wpml:gimbalPitchRotateEnable>
<wpml:gimbalPitchRotateAngle>-63</wpml:gimbalPitchRotateAngle>
<wpml:gimbalRollRotateEnable>0</wpml:gimbalRollRotateEnable>
<wpml:gimbalRollRotateAngle>0</wpml:gimbalRollRotateAngle>
<wpml:gimbalYawRotateEnable>0</wpml:gimbalYawRotateEnable>
<wpml:gimbalYawRotateAngle>0</wpml:gimbalYawRotateAngle>
<wpml:gimbalRotateTimeEnable>0</wpml:gimbalRotateTimeEnable>
<wpml:gimbalRotateTime>0</wpml:gimbalRotateTime>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
<wpml:action>
<wpml:actionId>2</wpml:actionId>
<wpml:actionActuatorFunc>gimbalRotate</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:gimbalHeadingYawBase>aircraft</wpml:gimbalHeadingYawBase>
<wpml:gimbalRotateMode>absoluteAngle</wpml:gimbalRotateMode>
<wpml:gimbalPitchRotateEnable>1</wpml:gimbalPitchRotateEnable>
<wpml:gimbalPitchRotateAngle>-39</wpml:gimbalPitchRotateAngle>
<wpml:gimbalRollRotateEnable>0</wpml:gimbalRollRotateEnable>
<wpml:gimbalRollRotateAngle>0</wpml:gimbalRollRotateAngle>
<wpml:gimbalYawRotateEnable>0</wpml:gimbalYawRotateEnable>
<wpml:gimbalYawRotateAngle>0</wpml:gimbalYawRotateAngle>
<wpml:gimbalRotateTimeEnable>0</wpml:gimbalRotateTimeEnable>
<wpml:gimbalRotateTime>10</wpml:gimbalRotateTime>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
</wpml:actionGroup>
<wpml:actionGroup>
<wpml:actionGroupId>2</wpml:actionGroupId>
<wpml:actionGroupStartIndex>0</wpml:actionGroupStartIndex>
<wpml:actionGroupEndIndex>2</wpml:actionGroupEndIndex>
<wpml:actionGroupMode>sequence</wpml:actionGroupMode>
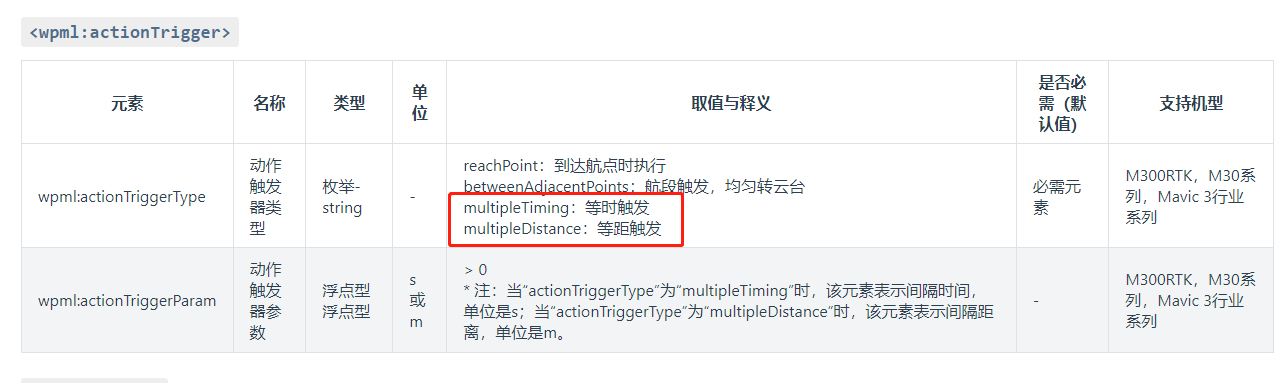
<wpml:actionTrigger>
<wpml:actionTriggerType>multipleTiming</wpml:actionTriggerType>
<wpml:actionTriggerParam>3</wpml:actionTriggerParam>
</wpml:actionTrigger>
<wpml:action>
<wpml:actionId>0</wpml:actionId>
<wpml:actionActuatorFunc>takePhoto</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
<wpml:payloadLensIndex>wide</wpml:payloadLensIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
</wpml:actionGroup>
<wpml:actionGroup>
<wpml:actionGroupId>4</wpml:actionGroupId>
<wpml:actionGroupStartIndex>0</wpml:actionGroupStartIndex>
<wpml:actionGroupEndIndex>1</wpml:actionGroupEndIndex>
<wpml:actionGroupMode>sequence</wpml:actionGroupMode>
<wpml:actionTrigger>
<wpml:actionTriggerType>betweenAdjacentPoints</wpml:actionTriggerType>
</wpml:actionTrigger>
<wpml:action>
<wpml:actionId>0</wpml:actionId>
<wpml:actionActuatorFunc>gimbalEvenlyRotate</wpml:actionActuatorFunc>
<wpml:actionActuatorFuncParam>
<wpml:gimbalPitchRotateAngle>-17</wpml:gimbalPitchRotateAngle>
<wpml:payloadPositionIndex>0</wpml:payloadPositionIndex>
</wpml:actionActuatorFuncParam>
</wpml:action>
</wpml:actionGroup>
</Placemark>这个是在pilot2上生成并导出kmz后中waylines.wpml中的一个航点代码, 其中gimbalEvenlyRotate这个属性在共有元素 https://developer.dji.com/doc/cloud-api-tutorial/cn/specification/dji-wpml/common-element.html 这个文档上并没有说明.
我在pilot2上的这个航点只设置了3个动作, 为什么waylines文件中会有3个action_group标签, 航点动作和action_group和action这3者之间是什么关系.
因为按文档上给出的模板和文字描述, 我的理解是每个航点标签下只有一个group, 包含当前航点的所有动作, 可pilot生成的文档却是同时包含了3个gorup, 而group中又包含了数量不同的action.
-
需要升级固件和MSDK到最新,还不行的话你在下面的链接提单,把kmz发给我,注明哪个机型。 Link:https://sdk-forum.dji.net/hc/zh-cn/requests/new

 而且为什么固件版本都升到最新了, 还会报这个问题
而且为什么固件版本都升到最新了, 还会报这个问题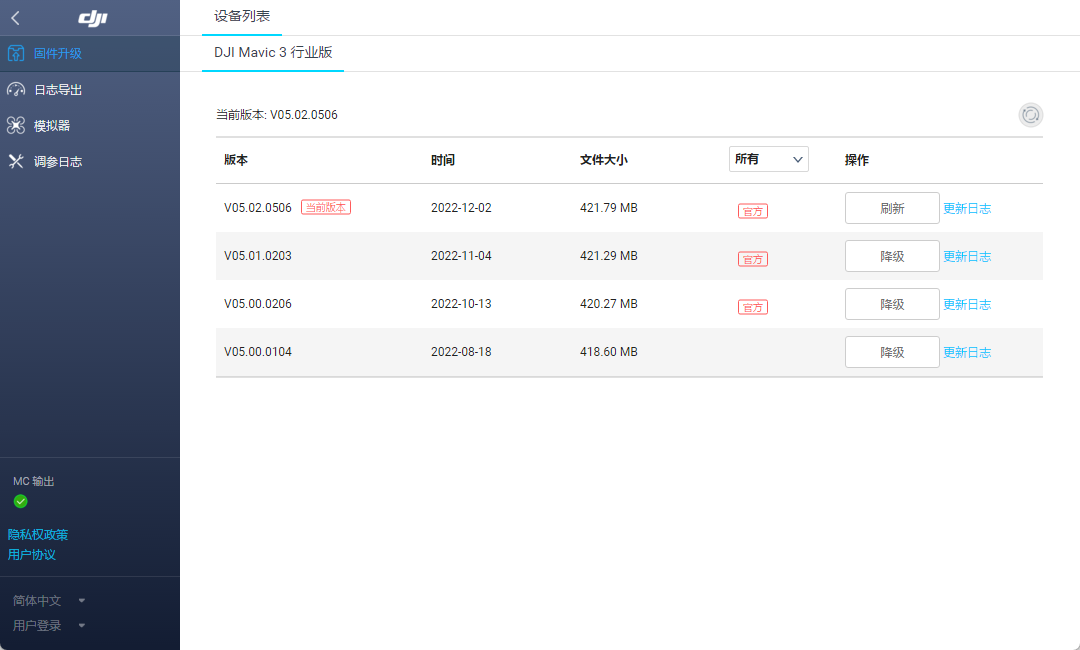

请先登录再写评论。
评论
17 条评论