
在航线飞行过程中,在飞行中飞机突然悬停,或其他异常现象时,不确认原因和需要做什么排查。下面提供相关的数据案例提供排查思路。
1、
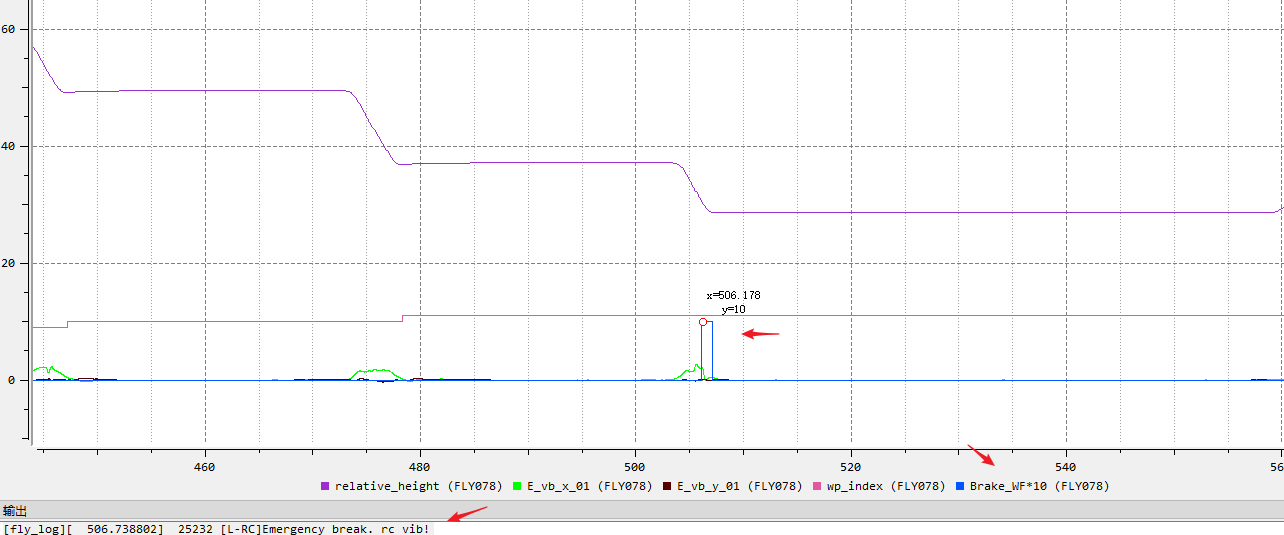
现象:航线中断。
原因:航线飞行中,飞机检测到障碍物导致航线中断,如图所示,向前飞行时触发避障。
排查思路:可以尝试关闭避障进行测试,但是要注意环境,确保安全飞行(注意,光线过强环境也会导致误触发避障)。
2、
现象:航线中断。
原因:RTK状态异常,导致航线任务中止,如图所示,GPS信号良好,但是RTK的Positioning solution从50掉到16。
排查思路:检查RTK状态。

3、
现象:航线中断。
原因:GPS信号突然转弱,导致航线中断。
排查思路:检查GPS信号。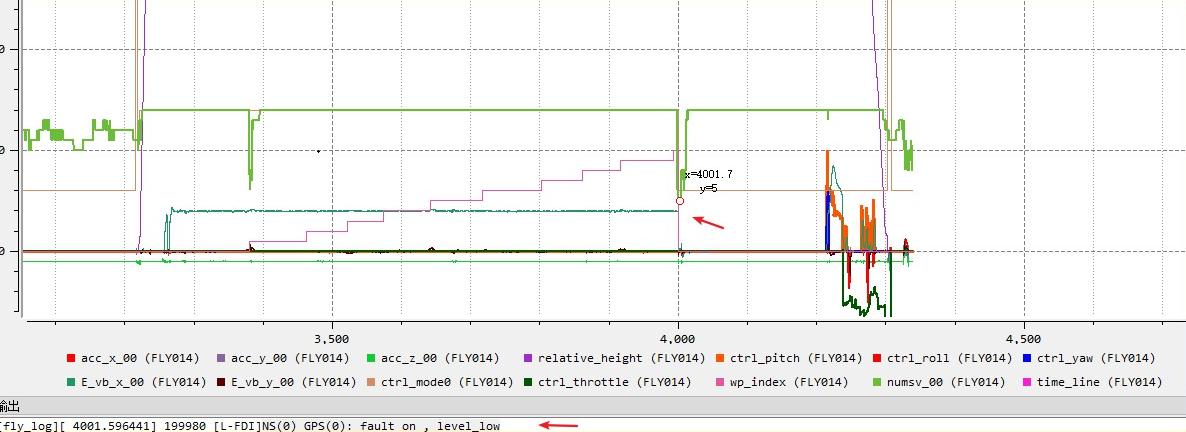
4、
现象:航线中断
原因:飞机传感器疑似异常,持续检测到近距离物体,航线中触发避障中断航线。
思路:可以用官方app看看是否在空旷地点时,在某个方向的传感器持续有近距离报警,如果确认有此异常,建议寄修处理。
5、
现象:虚拟遥杆控制中用OSDK发送返航指令,飞机不返航。
原因:如下图所示,返航指令只是导致飞机退出虚拟杆,再次发送返航指令,飞机进行了返航。
思路:需要先退出虚拟遥杆,再发返航指令。
6、
现象:无法全速下降,下降速度被限制。
原因:飞机传感器疑似异常,下方红外传感器,持续检测到近距离物体,限制下降速度。
思路:可以用官方app看看是否在空旷地点时,在下方传感器持续有近距离报警,如果确认有此异常,建议寄修处理。注意,在有雾雪环境也会影响传感器,有此现象。
7、
现象:虚拟遥杆中一发送指令就下降,不发送指令时正常。
原因:竖直方向控的是位置,一发送指令时,竖直方向发送的指令为,目标点为0的位置,导致飞行器下降。
思路:需要确认竖直方向控位置还是速度。
8、
现象:航线飞行时,飞机实际飞行的轨迹与规划不符。
原因:飞机水平方向融合速度差,比如在较低高度时,视觉传感器有参与水平速度检测,但可能地面环境不佳,导致视觉速度不精准,但参与了融合,导致飞行器控制出现误差。
思路:检查地面环境和GPS信号,到空旷地升高后(排除视觉)测试看是否有此问题。
9、
现象:飞行器出现不受控,乱飞现象。
原因:指南针受到环境干扰。
思路:这个问题是飞机本身受到环境影响,不是SDK的问题,用官方app飞也可能会有同样问题。需要校准指南针,换飞行环境试试。
总结:
如果出现以上或其他异常现象,需要进一步确认,都可以通过调参导出飞控数据,提交技术支持进一步排查。
评论
0 条评论
请登录写评论。