
使用waypointv2节点的 第二次调用waypointV2_init_setting_client服务初始化航路...
Completed-

您这个问题指的是OSDK ROS主节点不重启,再次上传航点任务动作ActionID重复了吧?ROS sample中的actionID是缓存再主节点中的,可以修改代码上传一次航点任务后清除缓存即可。 存储变量代码可以参考链接: https://sdk-forum.dji.net/hc/zh-cn/articles/900005798726-OSDK4-x-%E4%BD%BF%E7%94%A8ROS%E5%B9%B3%E5%8F%B0%E7%9A%84%E7%A4%BA%E4%BE%8B%E7%A8%8B%E5%BA%8F-%E6%89%A7%E8%A1%8Cwaypoint-V2%E5%AD%90%E8%8A%82%E7%82%B9%E5%90%8E-%E5%86%8D%E6%AC%A1%E6%89%A7%E8%A1%8C%E5%B0%B1%E4%BC%9A%E6%8A%A5%E9%94%99 -

EnableAd: 1
[3503392.797]STATUS/1 @ getDroneVersion, L1702: ret = 0
[3503392.798]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1ZNDH3L0011055
[3503392.798]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.8.93
[3503392.798]STATUS/1 @ functionalSetUp, L279: Shake hand with drone successfully by getting drone version.
[3503392.799]STATUS/1 @ legacyX5SEnableTask, L56: Legacy X5S Enable task created.
[3503393.799]STATUS/1 @ sendHeartbeatToFCTask, L1576: OSDK send heart beat to fc task created.
[3503394.000]STATUS/1 @ Control, L40: The control class is going to be deprecated.It will be better to use the FlightController class instead!
[3503394.001]STATUS/1 @ FileMgrImpl, L253: register download file callback handler successfully.
[3503394.019]STATUS/1 @ Firewall, L45: Firewall is initializing ...
[3503394.019]STATUS/1 @ Firewall, L65: osdk policy file updating(1) ......
[3503395.022]STATUS/1 @ Firewall, L73: osdk policy file updating(2) ......
[3503395.028]STATUS/1 @ RequestUploadPolicyFileHandle, L217: request upload policy file type:0
[3503395.029]STATUS/1 @ RequestUploadPolicyFileHandle, L234: Upload policy file info md5 checksum and version
[3503395.032]STATUS/1 @ RequestUploadPolicyFileHandle, L217: request upload policy file type:1
[3503395.032]STATUS/1 @ RequestUploadPolicyFileHandle, L254: request upload policy file data: 0 0 200
[3503395.034]STATUS/1 @ RequestUploadPolicyFileHandle, L217: request upload policy file type:1
[3503395.034]STATUS/1 @ RequestUploadPolicyFileHandle, L254: request upload policy file data: 1 200 175
[3503395.037]STATUS/1 @ RequestUploadPolicyFileHandle, L217: request upload policy file type:2
[3503395.037]STATUS/1 @ RequestUploadPolicyFileHandle, L282: request upload policy file success
[3503396.023]STATUS/1 @ firewallTask, L112: firewall task created ...
[3503396.038]STATUS/1 @ getDroneVersion, L1702: ret = 0
[3503396.039]STATUS/1 @ parseDroneVersionInfo, L1122: Device Serial No. = 1ZNDH3L0011055
[3503396.039]STATUS/1 @ parseDroneVersionInfo, L1124: Firmware = 3.4.8.93
[3503396.069]ERRORLOG/1 @ AdvancedSensing, L108: Failed to initialize USB Bulk Linker channel for liveview!
[3503396.069]ERRORLOG/1 @ AdvancedSensing, L115: Failed to create task for liveview!
[3503396.071]ERRORLOG/1 @ AdvancedSensing, L123: Failed to initialize USB Bulk Linker channel for perception!
[3503396.071]ERRORLOG/1 @ AdvancedSensing, L130: Failed to create task for advanced sensing!
[3503396.071]STATUS/1 @ AdvancedSensing, L135: Advanced Sensing init for the M300 drone
[3503396.071]STATUS/1 @ LiveViewImpl, L89: Finding if liveview stream is available now.
[3503396.872]STATUS/1 @ init, L254: Start advanced sensing initalization
[3503396.873]STATUS/1 @ activate, L1329: version 0x304085D[3503396.880]STATUS/1 @ activate, L1367: Activation successful
[0m[ INFO] [1639885937.661903000]: VehicleNode Start[0m
[0m[ INFO] [1639885937.663337628]: Topic startup![0m
[0m[ INFO] [1639885938.516929342]: Services startup![0m
[0m[ INFO] [1639885938.999567566]: Use data subscription to get telemetry data![0m
[0m[ INFO] [1639885939.000248112]: align_time_with_FC set to false. We will use ros time to time stamp messages![0m
[3503399.316]STATUS/1 @ verify, L244: Verify subscription successful.
[3503399.337]STATUS/1 @ startPackage, L345: Start package 3 result: 0.
[3503399.337]STATUS/1 @ startPackage, L347: Package 3 info: freq=100, nTopics=3.[3503399.382]STATUS/1 @ startPackage, L345: Start package 2 result: 0.
[3503399.382]STATUS/1 @ startPackage, L347: Package 2 info: freq=50, nTopics=14.[3503399.401]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[3503399.402]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=1.[3503399.421]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[3503399.540]STATUS/1 @ startPackage, L345: Start package 1 result: 0.
[3503399.541]STATUS/1 @ startPackage, L347: Package 1 info: freq=5, nTopics=12.[3503399.562]STATUS/1 @ startPackage, L345: Start package 4 result: 0.
[3503399.562]STATUS/1 @ startPackage, L347: Package 4 info: freq=400, nTopics=1.[3503400.568]STATUS/1 @ subscribeHMSInf, L117: Subscribe all flight data success!
[0m[ INFO] [1639885946.003029727]: called waypointV2InitSettingCallback[0m
[3503406.236]STATUS/1 @ initWaypointV2, L2108: Init mission setting successfully![0m[ INFO] [1639885946.026032915]: called waypointV2UploadMissionCallback[0m
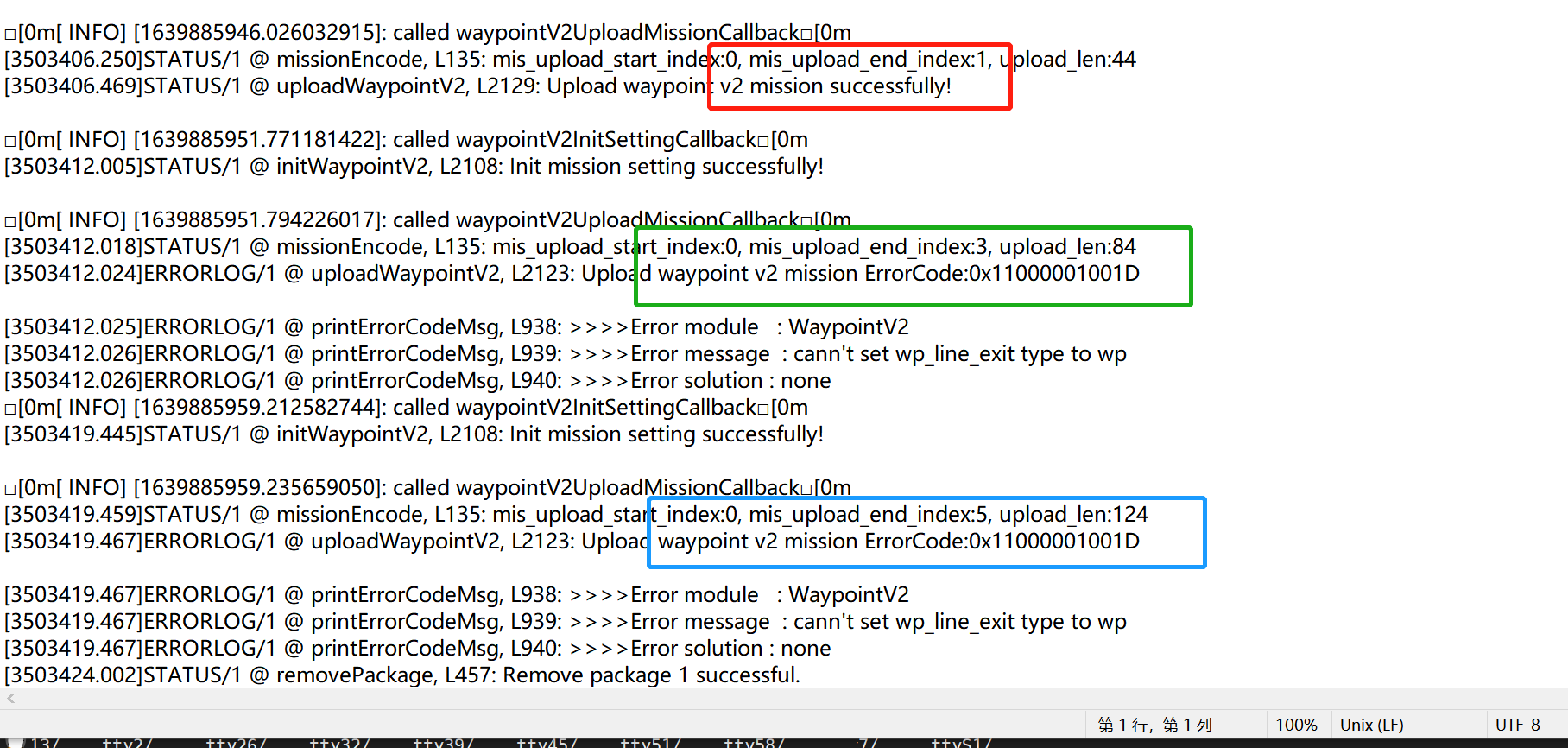
[3503406.250]STATUS/1 @ missionEncode, L135: mis_upload_start_index:0, mis_upload_end_index:1, upload_len:44
[3503406.469]STATUS/1 @ uploadWaypointV2, L2129: Upload waypoint v2 mission successfully![0m[ INFO] [1639885951.771181422]: called waypointV2InitSettingCallback[0m
[3503412.005]STATUS/1 @ initWaypointV2, L2108: Init mission setting successfully![0m[ INFO] [1639885951.794226017]: called waypointV2UploadMissionCallback[0m
[3503412.018]STATUS/1 @ missionEncode, L135: mis_upload_start_index:0, mis_upload_end_index:3, upload_len:84
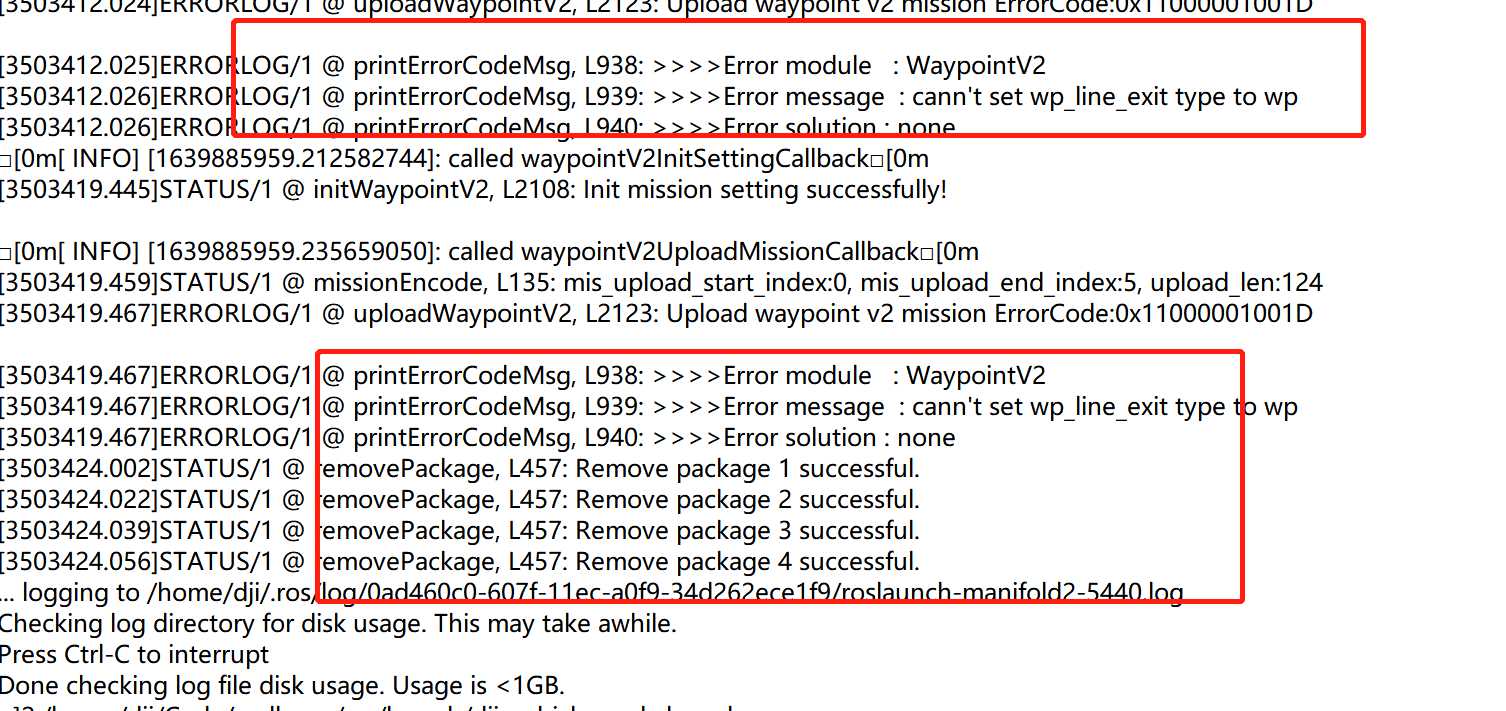
[3503412.024]ERRORLOG/1 @ uploadWaypointV2, L2123: Upload waypoint v2 mission ErrorCode:0x11000001001D[3503412.025]ERRORLOG/1 @ printErrorCodeMsg, L938: >>>>Error module : WaypointV2
[3503412.026]ERRORLOG/1 @ printErrorCodeMsg, L939: >>>>Error message : cann't set wp_line_exit type to wp
[3503412.026]ERRORLOG/1 @ printErrorCodeMsg, L940: >>>>Error solution : none
[0m[ INFO] [1639885959.212582744]: called waypointV2InitSettingCallback[0m
[3503419.445]STATUS/1 @ initWaypointV2, L2108: Init mission setting successfully![0m[ INFO] [1639885959.235659050]: called waypointV2UploadMissionCallback[0m
[3503419.459]STATUS/1 @ missionEncode, L135: mis_upload_start_index:0, mis_upload_end_index:5, upload_len:124
[3503419.467]ERRORLOG/1 @ uploadWaypointV2, L2123: Upload waypoint v2 mission ErrorCode:0x11000001001D[3503419.467]ERRORLOG/1 @ printErrorCodeMsg, L938: >>>>Error module : WaypointV2
[3503419.467]ERRORLOG/1 @ printErrorCodeMsg, L939: >>>>Error message : cann't set wp_line_exit type to wp
[3503419.467]ERRORLOG/1 @ printErrorCodeMsg, L940: >>>>Error solution : none
[3503424.002]STATUS/1 @ removePackage, L457: Remove package 1 successful.
[3503424.022]STATUS/1 @ removePackage, L457: Remove package 2 successful.
[3503424.039]STATUS/1 @ removePackage, L457: Remove package 3 successful.
[3503424.056]STATUS/1 @ removePackage, L457: Remove package 4 successful.
... logging to /home/dji/.ros/log/0ad460c0-607f-11ec-a0f9-34d262ece1f9/roslaunch-manifold2-5440.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
]2;/home/dji/Code/osdk_ros/src/launch/dji_vehicle_node.launch
[1mstarted roslaunch server http://manifold2:37074/[0mSUMMARY
========PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
* /vehicle_node/acm_name: /dev/ttyACM0
* /vehicle_node/align_time: False
* /vehicle_node/app_id: 1109126
* /vehicle_node/app_version: 1
* /vehicle_node/baud_rate: 921600
* /vehicle_node/enc_key: 8f74c536c6ce90248...
* /vehicle_node/oss_access_key_id: LTAI5tCVCFS5hmrDz...
* /vehicle_node/oss_access_key_secret: 4ByucjcmWVkUbOpeR...
* /vehicle_node/oss_bucket_name: lfkj-obc
* /vehicle_node/oss_end_point: oss-cn-hangzhou.a...
* /vehicle_node/serial_name: /dev/ttyTHS2
* /vehicle_node/use_broadcast: FalseNODES
/
vehicle_node (dji_osdk_ros/dji_vehicle_node)auto-starting new master
[1mprocess[master]: started with pid [5450][0m
[1mROS_MASTER_URI=http://localhost:11311[0m
]2;/home/dji/Code/osdk_ros/src/launch/dji_vehicle_node.launch http://localhost:11311
[1msetting /run_id to 0ad460c0-607f-11ec-a0f9-34d262ece1f9[0m
[1mprocess[rosout-1]: started with pid [5463][0m
started core service [/rosout]
[1mprocess[vehicle_node-2]: started with pid [5476][0m
[vehicle_node-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
[1mdone[0m -
log显示USB初始化异常,可以尝试用sudo权限来运行程序,或者参考官网先添加DJI USB node。waypoint v2是通过USB通信的,这种情况下上传航点任务会有问题。可以先确保USB正常后,再测试若问题依旧存在再提供log。   -
1、误报usb显示异常应该也是不正常的,建议可以厘清一下该逻辑。 2、这边使用ROS sample简单写了个测试程序验证该问题,如下:waypointV2_node.cpp中添加下述代码,stop上一次航点任务后再次初始化、上传并启动航点任务,测试正常。看起来该问题与您实现有关,您可以参考下述操作,若还是不行,请提供完整可复现问题的代码(若方便,最好基于ROS demo的修改复现),以便查看和确认。  
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please sign in to leave a comment.
Comments
8 comments